Melsec-q, 12 control sub functions [2] control details, 3] precautions during control – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 500
12 - 24
MELSEC-Q
12 CONTROL SUB FUNCTIONS
[2] Control details
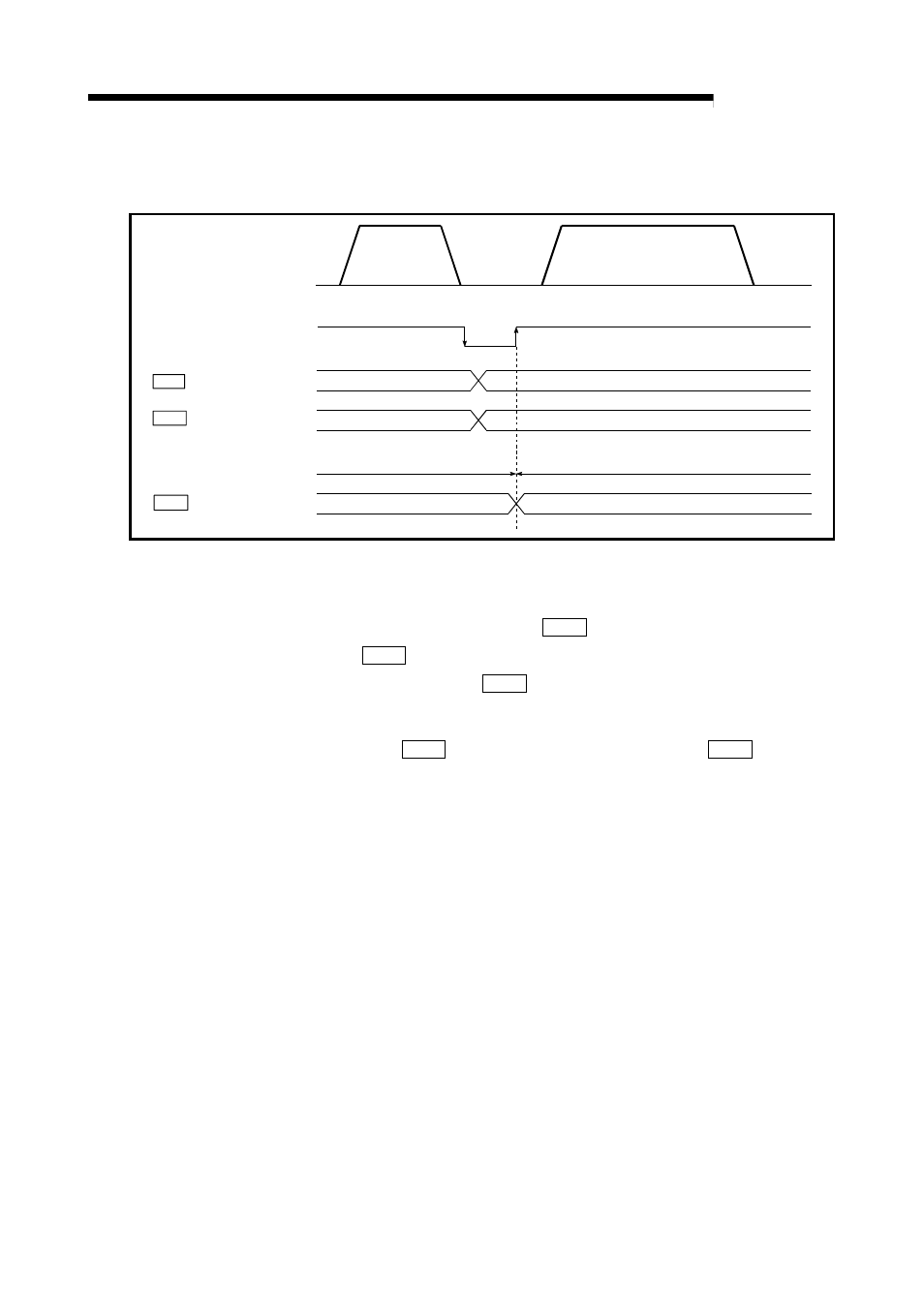
The following drawing shows the operation of the torque limit function.
50%
0%
100%
0%
100%
50%
Torque limited at the parameter
torque limit setting value (100%)
Various operations
PLC READY signal [Y0]
Pr.17 Torque limit setting value
Cd.22 New torque value
Md.35 Torque limit stored value
Torque limited at the parameter
torque limit setting value (50%)
Fig. 12.13 Torque limit function operation
[3] Precautions during control
(1) When limiting the torque at the "
Pr.17
Torque limit setting value", confirm
that "
Cd.22
New torque value" is set to "0". If this parameter is set to a
value besides "0", the "
Cd.22
New torque value" will be validated, and the
torque will be limited at that value. (Refer to Section 12.5.4 "Torque change
function" for details about the "new torque value".)
(2) When the “
Pr.54
OPR torque limit value “exceeds the “
Pr.17
Torque
limit setting value”, an error occurs. (Error code: 995)
(3) When limiting the torque, a D/A converter module and drive unit in which
torque limit commands by analog voltage are possible.
(4) When the operation is stopped by torque limiting, the droop pulse will remain
in the deviation counter. If a "deviation counter clear" is carried out by
issuing an external signal at this time, positional deviation will occur when
the operation is continued. If the load torque is eliminated, operation for the
amount of droop pulses will be carried out.