Melsec-q, 15 troubleshooting – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 613
15 - 9
MELSEC-Q
15 TROUBLESHOOTING
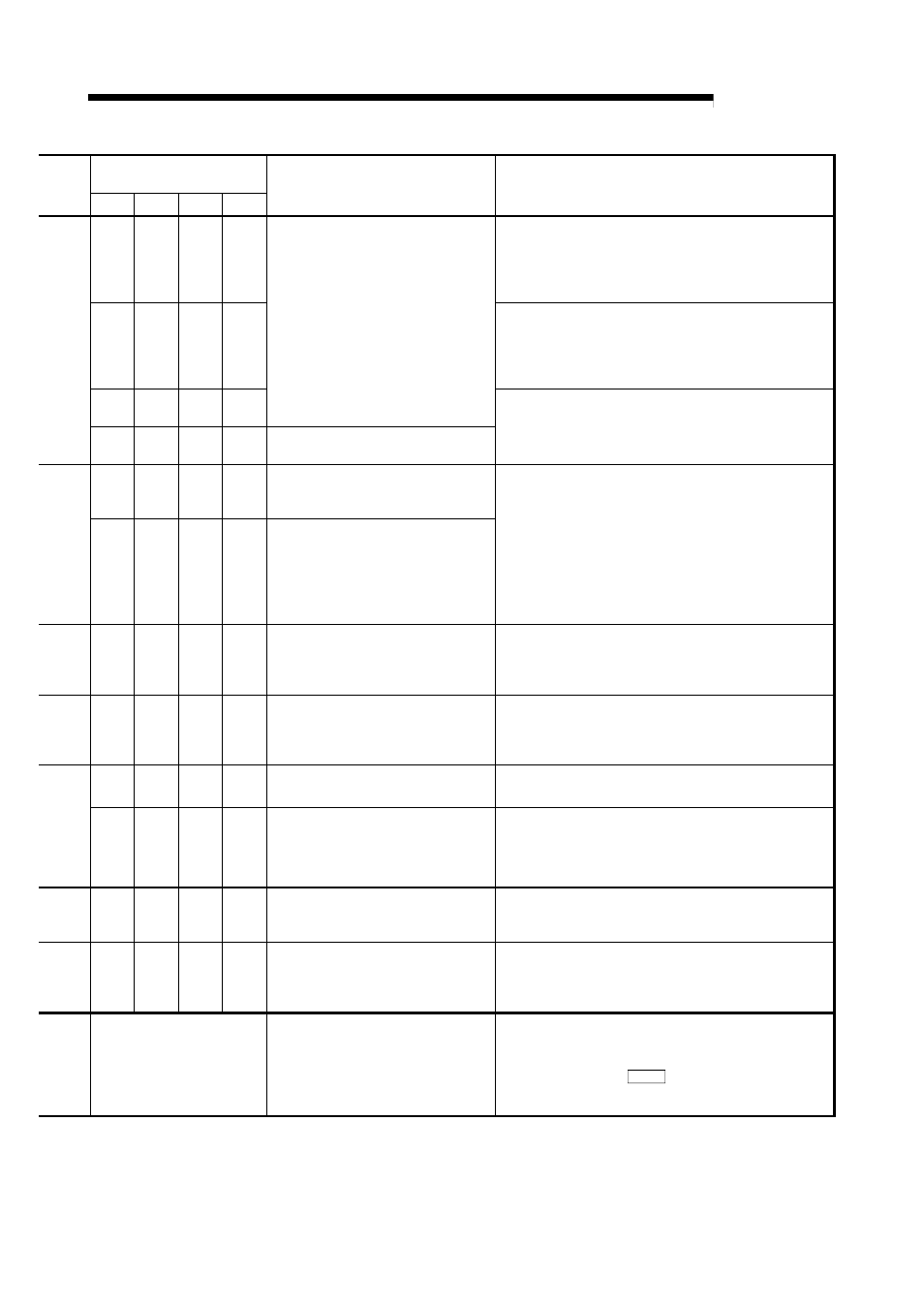
Related buffer memory
address
Axis 1 Axis 2 Axis 3 Axis 4
Set range
(Setting with sequence program)
Remedy
74
75
224
225
374
375
524
525
• Lower the OPR speed.
• Increase the dog signal input time.
(Refer to Section 8.2.3)
74
75
224
225
374
375
524
525
• Lower the OPR speed.
• Input external zero signals during the movement at a
creep speed.
(Refer to Section 8.2.5)
74
75
224
225
374
375
524
525
1 to 1000000 [pulse/s]
1 to 2000000000 [mm/min or others]
79
229
379
529
0 to 65535
• Lower the OPR speed.
• Increase the OPR dwell time.
(Refer to Section 8.2.4)
80
81
230
231
380
381
530
531
near-point dog ON> 0 to 2147483647 74 224 374 524 1 to 1000000 [pulse/s] 1 to 2000000000 [mm/min] • Calculate the movement distance using a speed limit, OPR speed, and deceleration time, and set the • Lower the OPR speed. • Adjust the near-point dog position so that the movement amount after near-point dog ON becomes 1500 1600 1700 1800 1 to 600 7000 to 7004 Execute the machine OPR (positioning No. 9001). 1500 1600 1700 1800 1 to 600 7000 to 7004 Start the machine OPR (positioning start No. 9001) — — — — — • Review the wiring. (Refer to Section 12.6) • Review the sequence program. — — — — — • Review the wiring. (Refer to Section 12.6) • Review the sequence program. • Review the dedicated instruction parameters. (Refer to Section 14.3) 1518 1618 1718 1818 1 to 1000000 [pulse/s] 1 to 2000000000 [mm/min or others] Bring the JOG speed into the setting range. 1517 1617 1717 1817 0 to 65535 Reduce the inching movement amount. Refer to Section 5.4 "List of block start data" 1 to 10 Review the condition data No. Da.14 )
75
225
375
525
movement amount after near-point dog ON so that
the distance becomes a deceleration distance or
longer.
longer. (Refer to Section 8.2.7, 8.2.8)
9001 to 9004
(Refer to Section 8.2)
9001 to 9004
again. (Refer to Section 8.2)
1519
1619
1719
1819
(Refer to Section 11.2)
(Refer to Section 11.3)
(Refer to Section 5.4