Melsec-q, 9 major positioning control remark – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 326
9 - 26
MELSEC-Q
9 MAJOR POSITIONING CONTROL
REMARK
•
It is recommended that the "positioning data" be set whenever possible with GX Configurator-QP.
Execution by sequence program uses many sequence programs and devices. The execution becomes
complicated, and the scan times will increase.
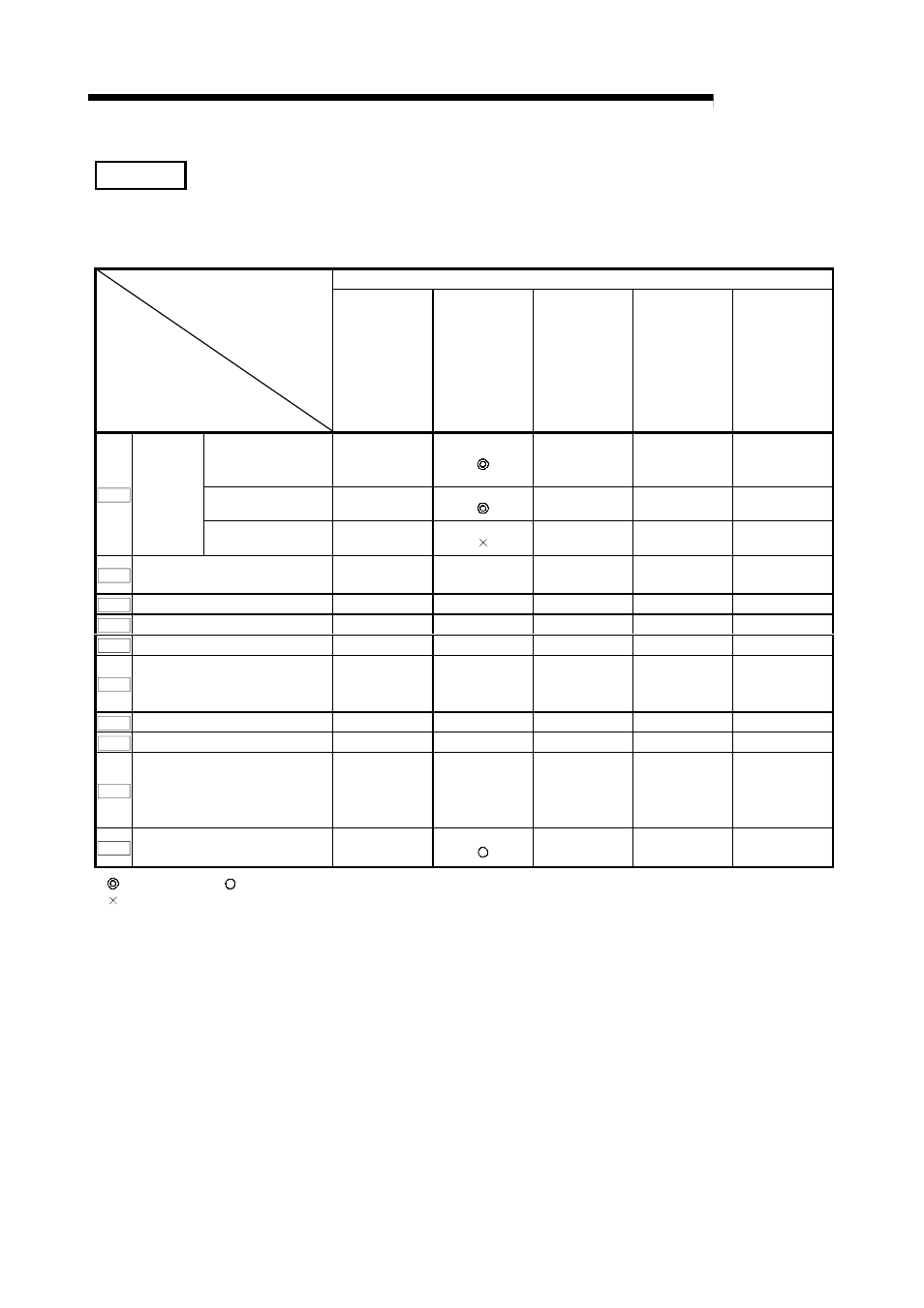
Other control
Major positioning control
Positioning data setting items
NOP instruction
Current value
changing
JUMP instruction LOOP instruction LEND instruction
Independent
positioning control
(Positioning complete)
–
–
–
–
Continuous positioning
control
–
–
–
–
Da.1
Operation
pattern
Continuous path
control
–
–
–
–
Da.2
Control system
NOP instruction
Current value
changing
JUMP instruction LOOP instruction LEND instruction
Da.3
Acceleration time No.
–
–
–
–
–
Da.4
Deceleration time No.
–
–
–
–
–
Da.5
Axis to be interpolated
–
–
–
–
–
Da.6
Positioning address/movement
amount
–
Change
destination
address
–
–
–
Da.7
Arc address
–
–
–
–
–
Da.8
Command speed
–
–
–
–
–
Da.9
Dwell time
–
–
JUMP
destination-
positioning data
No.
–
–
Da.10
M code
–
Condition data
No. at JUMP
No. of repetition
–
: Always set
: Set as required ("–" when not set)
: Setting not possible (If setting is made, an error (error code: 515) will occur.)
– : Setting not required (Setting value is invalid. Use the initial values or setting values within a range where no error occurs.)