Melsec-q, 5 data used for positioning control, Pr.14 software stroke limit selection – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 118: Pr.15 software stroke limit valid/invalid setting, Pr.16 command in-position width
5 - 30
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
1) Generally, the OP is set at the lower limit or upper limit of the stroke limit.
2) By setting the upper limit value or lower limit value of the software stroke limit,
overrun can be prevented in the software. However, an emergency stop limit
switch must be installed nearby outside the range.
3) To invalidate the software stroke limit, set the setting value to "upper limit
value = lower limit value". (The setting value can be anything.)
4) When the unit is "degree", the software stroke limit check is invalid during
speed control (including speed-position switching control, position-speed
switching control) or during manual control.
Pr.14 Software stroke limit selection
Set whether to apply the software stroke limit on the "current feed value" or the
"machine feed value". The software stroke limit will be validated according to the
set value.
Pr.15 Software stroke limit valid/invalid setting
Set whether to validate the software stroke limit during JOG/Inching operation and
manual pulse generator operation.
Setting value, setting range
Setting value buffer memory
address
Item
Value set with peripheral device
Value set with sequence
program
Default
value
Axis 1 Axis 2 Axis 3 Axis 4
Pr.16
Command in-position width
The setting value range differs depending on the "
Pr.1
Unit
setting".
Here, the value within the [Table 1] range is set.
[Table 1] on right page
100
24
25
174
175
324
325
474
475
Pr.17
Torque limit setting value
1 to 500 (%)
1 to 500 (%)
300
26
176
326
476
0 : WITH mode
0
Pr.18
M code ON signal output
timing
1 : AFTER mode
1
0
27
177
327
477
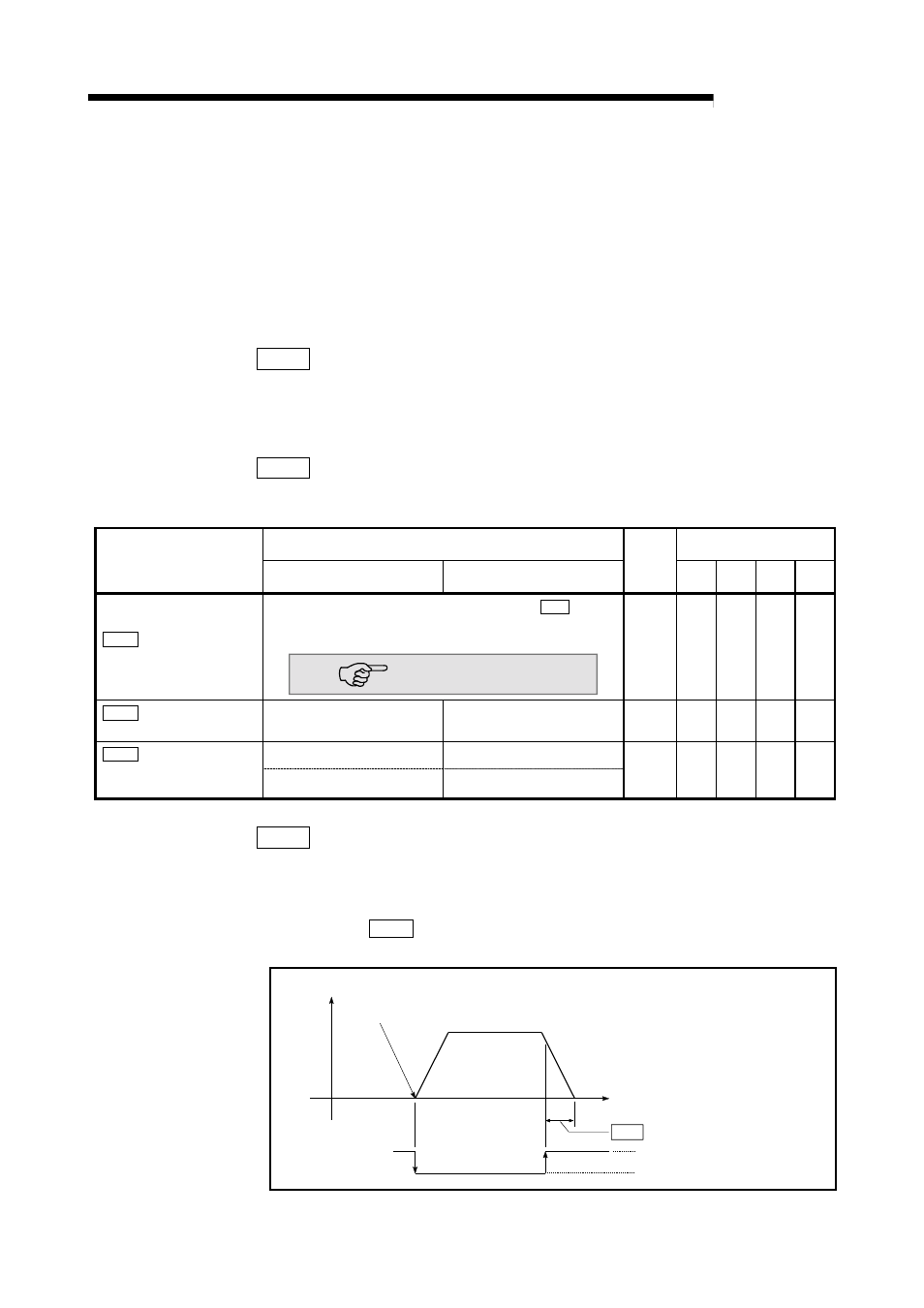
Pr.16 Command in-position width
Set the remaining distance that turns the command in-position ON. The command
in-position signal is used as a front-loading signal of the positioning complete
signal. When positioning control is started, the "command in-position flag" (3rd flag
from right) in "
Md.31
Status" turns OFF, and the "command in-position flag" turns
ON at the set position of the command in-position signal.
ON
OFF
Pr.16
Command in-position width
Speed
Position control start
Command
in-position flag