Melsec-q, Appendices – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 650
Appendix - 8
MELSEC-Q
APPENDICES
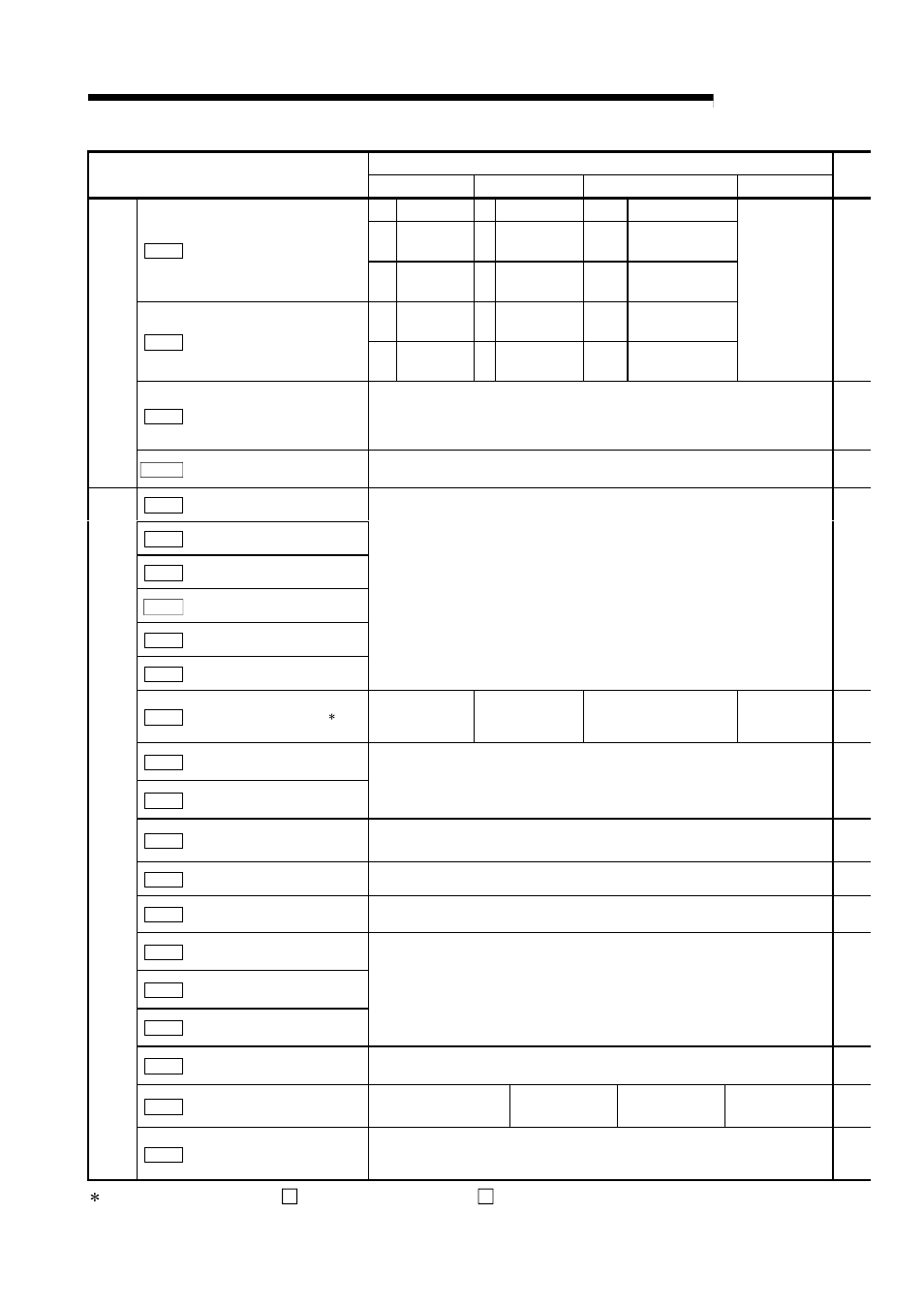
Setting range
Item
mm
inch
degree
pulse
b0 Lower limit b3 Stop signal
b6
Near-point signal
b1 Upper limit b4
External
command
b7, b9
to b15
Unused
Pr.22
Input signal logic selection
b2
Drive unit
READY
b5 Zero signal
b8
Manual pulse
generator input
b0
Command
pulse signal
b2 Unused
b4
Deviation
counter clear
Pr.23
Output signal logic selection
b1 Unused
b3 Unused
b5 to
b15
Unused
Setting of
each bit value
0: Negative
logic
1: Positive
logic
("0" is set for
unused bit.)
Pr.24
Manual pulse generator
input selection
0: A phase/B phase multiple of 4
1: A phase/B phase multiple of 2
2: A phase/B phase multiple of 1
3: PULSE/SIGN mode
D
e
tailed parameters
1
Pr.150
Speed -position function
selection
0: Speed-position switching control (INC mode)
2: Speed-position switching control (ABS mode)
Pr.25
Acceleration time 1
Pr.26
Acceleration time 2
Pr.27
Acceleration time 3
Pr.28
Deceleration time 1
Pr.29
Deceleration time 2
Pr.30
Deceleration time 3
1 to 8388608ms
Pr.31
JOG speed limit value
1 to
2000000000
×
10
-2
mm/min
1 to 2000000000
×
10
-3
inch/min
1 to 2000000000
×
10
-3
degree/min
1 to 1000000/
1 to 200000
pulse
Pr.32
JOG operation acceleration
time selection
Pr.33
JOG operation deceleration
time selection
0 to 3
Pr.34
Acceleration/deceleration
process selection
0: Automatic trapezoidal acceleration/deceleration process
1: S-pattern acceleration/deceleration process
Pr.35
S-pattern proportion
1 to 100%
Pr.36
Sudden stop deceleration
time
1 to 8388608ms
Pr.37
Stop group 1 sudden stop
selection
Pr.38
Stop group 2 sudden stop
selection
Pr.39
Stop group 3 sudden stop
selection
0: Normal deceleration stop
1: Sudden stop
Pr.40
Positioning complete signal
output time
0 to 65535ms
Pr.41
Allowable circular
interpolation error width
1 to 100000
×
10
-1
µ
m
1 to 100000
×
10
-5
inch
1 to 100000
×
10
-5
degree
1 to 100000
pulse
D
e
tailed parameters
2
Pr.42
External command function
selection
0: External positioning start 1: External speed change request
2: Speed-position or position-speed switching request
3: Skip request
:
"1 to 1000000" for QD75D
and "1 to 200000" for QD75P
when the unit is "pulse".