Melsec-q, 5 data used for positioning control, Pr.36 sudden stop deceleration time – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 128
5 - 40
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
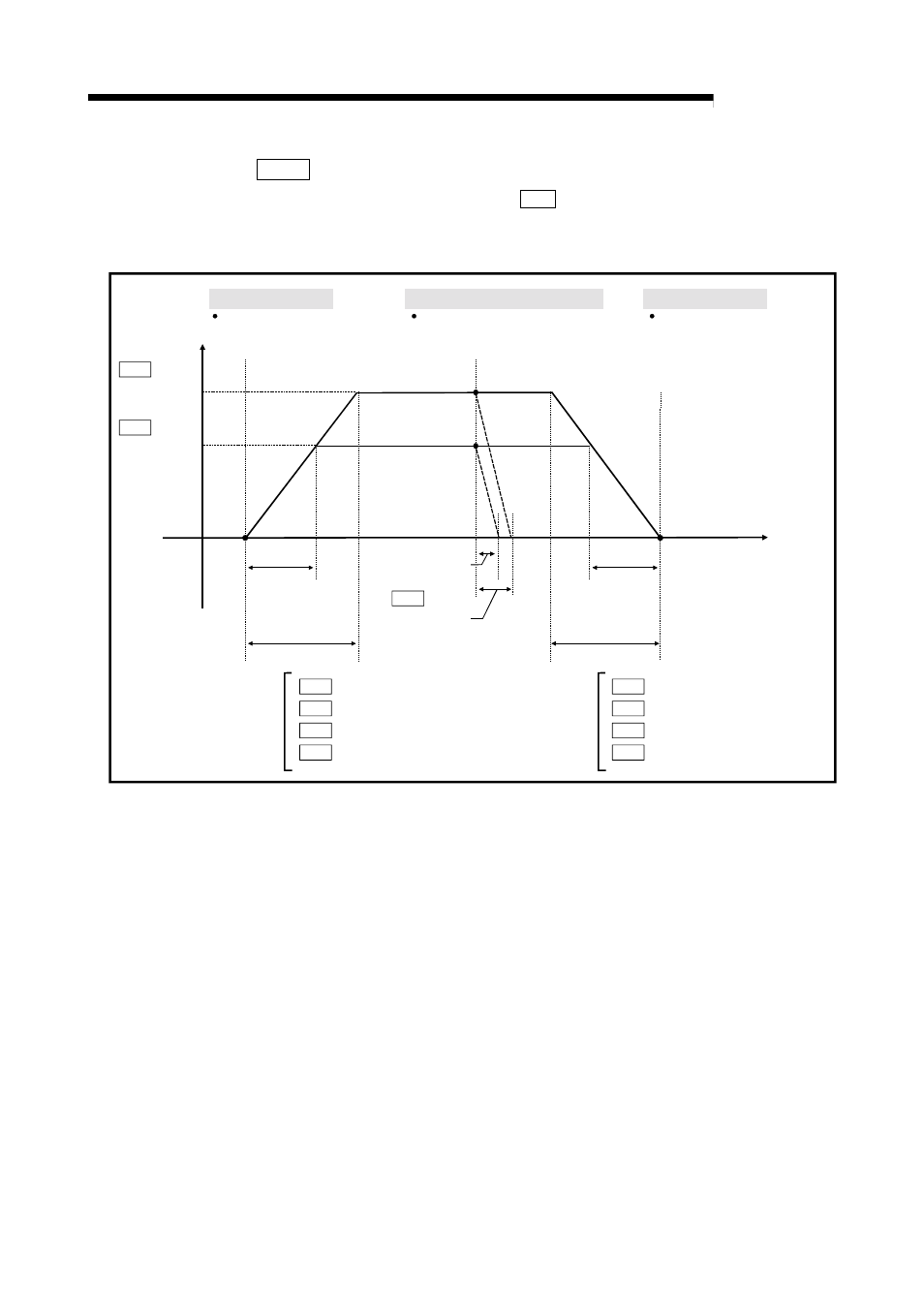
Pr.36 Sudden stop deceleration time
Set the time to reach speed 0 from " Pr.8 Speed limit value" during the sudden
stop.
The illustration below shows the relationships with other parameters.
When positioning is started,
the acceleration starts following
the "acceleration time".
1) Positioning start
2) Sudden stop cause occurrence
When a "sudden stop cause" occurs,
the deceleration starts following the
"sudden stop deceleration time".
3) Positioning stop
When a "sudden stop cause"
does not occur, the decelera-
tion starts toward the stop
position following the "decel-
eration time".
Actual accel-
eration time
Actual sudden stop
deceleration time
Acceleration time
Actual decel-
eration time
Deceleration time
Speed limit
value
Pr.8
Command
speed
Da.8
Pr.36
Sudden stop
deceleration time
Acceleration time 0
Pr.9
Acceleration time 1
Pr.25
Acceleration time 2
Pr.26
Acceleration time 3
Pr.27
Deceleration time 0
Pr.10
Deceleration time 1
Pr.28
Deceleration time 2
Pr.29
Deceleration time 3
Pr.30