Melsec-q, Appendices – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 652
Appendix - 10
MELSEC-Q
APPENDICES
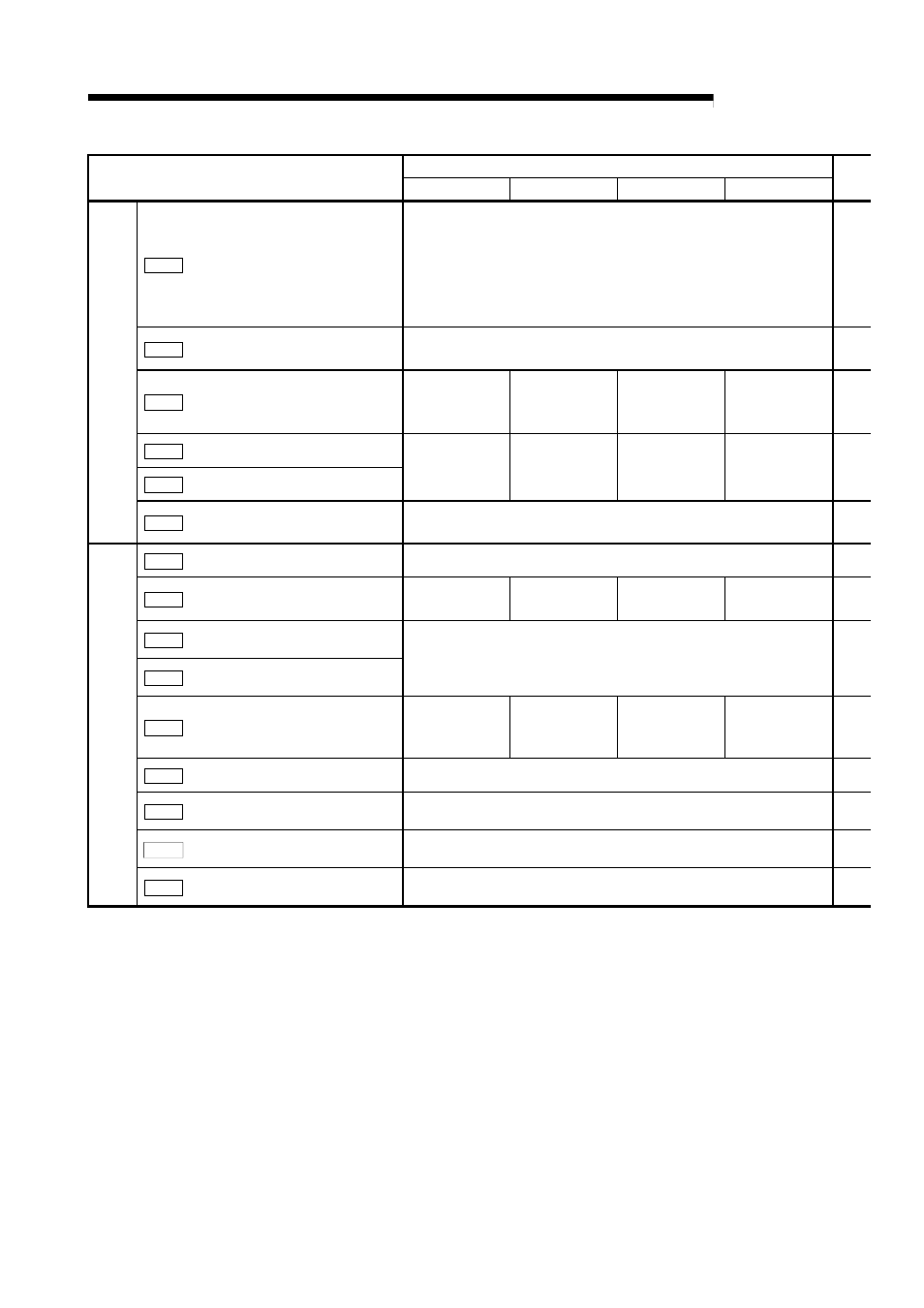
Setting range
Item
mm
inch
degree
pulse
Pr.43
OPR method
0: Near-point dog method
1: Stopper method 1) (By dwell time elapse)
2: Stopper method 2) (By OP signal when stopper is hit)
3: Stopper method 3) (Without near-point dog method)
4: Count method 1) (Use zero signal)
5: Count method 2) (Do not use zero signal)
Pr.44
OPR direction
0: Positive direction (address increment direction)
1: Negative direction (address decrement direction)
Pr.45
OP address
–2147483648 to
2147483647
×
10
-1
µ
m
–2147483648 to
2147483647
×
10
-5
inch
0 to 35999999
×
10
-5
degree
–2147483648 to
2147483647
pulse/s
Pr.46
OPR speed
Pr.47
Creep speed
1 to 2000000000
×
10
-2
mm/min
1 to 2000000000
×
10
-3
inch/min
1 to 2000000000
×
10
-3
degree/min
1 to 1000000
pulse/s
O
P
R
basic parameters
Pr.48
OPR retry
0: Do not retry OPR with upper/lower limit switch
1: Retry OPR with upper/lower limit switch
Pr.49
OPR dwell time
0 to 65535ms
Pr.50
Setting for the movement amount
after near-point dog ON
0 to 2147483647
×
10
-1
µ
m
0 to 2147483647
×
10
-5
inch
0 to 2147483647
×
10
-5
degree
0 to 2147483647
pulse
Pr.51
OPR acceleration time selection
Pr.52
OPR deceleration time selection
0 to 3
Pr.53
OP shift amount
–2147483648 to
2147483647
×
10
-1
µ
m
–2147483648 to
2147483647
×
10
-5
inch
0 to 35999999
×
10
-5
degree
–2147483648 to
2147483647
pulse
Pr.54
OPR torque limit value
0 to 300%
Pr.55
Deviation counter clear signal
output time
1 to 65535ms
Pr.56
Speed designation during OP shift 0: OPR speed 1: Creep speed
O
P
R
detailed parameters
Pr.57
Dwell time during OPR retry
0 to 65535ms