Melsec-q, 2] precautions for control – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 573
12 - 97
MELSEC-Q
12 CONTROL SUB FUNCTIONS
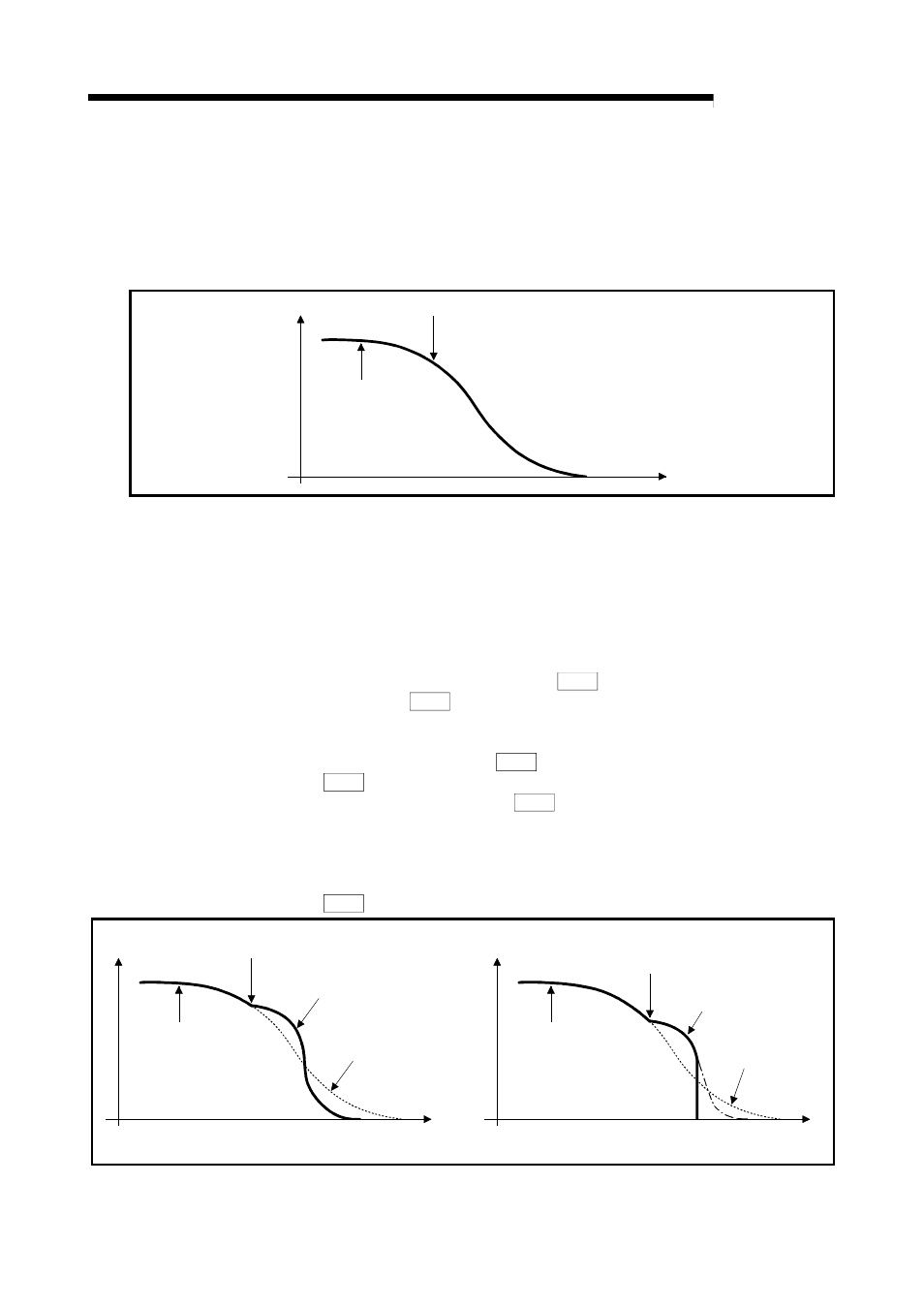
(2) Deceleration curve continuation
The current deceleration curve is continued after a stop cause has
occurred.
If a stop cause occurs during automatic deceleration of position control, the
deceleration stop processing may be complete before the target has
reached the positioning address specified in the positioning data that is
currently executed.
Stop cause occurrence
t
V
Deceleration stop
processing (automatic
deceleration) start
Fig. 12.54 Deceleration curve continuation operation (for position control or S-pattern
acceleration/deceleration processing)
[2] Precautions for control
(1) In manual control (JOG operation, inching operation, manual pulse generator
operation), the stop command processing for deceleration stop function is
invalid.
(2) The stop command processing for deceleration stop function is valid when "0:
Normal deceleration stop" is set in "
Pr.37
Stop group 1 sudden stop
selection" to "
Pr.39
Stop group 3 sudden stop selection" as the stopping
method for stop cause occurrence.
(3) The stop command processing for deceleration stop function is invalid when
"1: Sudden stop" is set in "
Pr.37
Stop group 1 sudden stop selection" to
"
Pr.39
Stop group 3 sudden stop selection". (A deceleration curve is re-
processed, according to the "
Pr.36
Sudden stop deceleration time" (starting
from the speed at stop cause occurrence to a stop))
In the position control (including position control of speed/position changeover
control or position/speed changeover control) mode, positioning may stop
immediately depending on the stop cause occurrence timing and
"
Pr.36
Sudden stop deceleration time" setting.
Stop cause occurrence
(Sudden stop cause)
Deceleration curve
according to sudden
stop deceleration time
Deceleration curve
when stop cause
does not occur
(Immediate stop at the specified positioning address)
t
V
Deceleration stop
processing (automatic
deceleration) start
Stop cause occurrence
(Sudden stop cause)
Deceleration curve according
to sudden stop deceleration time
Deceleration curve when
stop cause does not occur
(Sudden stop in front of the specified positioning address)
t
V
Deceleration stop
processing (automatic
deceleration) start
Fig. 12.55 Sudden stop operation (for position control or S-pattern acceleration/deceleration processing)