Melsec-q, 5 data used for positioning control, Da.10 – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 147
5 - 59
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
ˆÊ ’u Œ
ˆ
‚Я ¯ •К q
Da.1@ ` @ Da.4
²‚
P
ˆÊ ’u Œ
ˆ
‚ß ƒ
A ƒ
h ƒ
Œ ƒ
X
Da.5
‰
~
Œ
Ê
ƒ
A ƒ
h ƒ
Œ ƒ
X
Da.6
w —
ß
‘¬ “x
Da.7
ƒ
h ƒ
E ƒ
F ƒ
‹ ƒ
^ ƒ
C ƒ
€
Da.8
Mƒ
R [ ƒ
h
Da.9
ˆÊ ’u Œ
ˆ
‚Я ¯ •К q
Da.1@ ` @ Da.4
²‚
P
ˆÊ ’u Œ
ˆ
‚ß ƒ
A ƒ
h ƒ
Œ ƒ
X
Da.5
‰
~
Œ
Ê
ƒ
A ƒ
h ƒ
Œ ƒ
X
Da.6
w —
ß
‘¬ “x
Da.7
ƒ
h ƒ
E ƒ
F ƒ
‹ ƒ
^ ƒ
C ƒ
€
Da.8
Mƒ
R [ ƒ
h
Da.9
ˆÊ ’u Œ
ˆ
‚Я ¯ •К q
Da.1@ ` @ Da.4
²‚
P
ˆÊ ’u Œ
ˆ
‚ß ƒ
A ƒ
h ƒ
Œ ƒ
X
Da.5
‰
~
Œ
Ê
ƒ
A ƒ
h ƒ
Œ ƒ
X
Da.6
w —
ß
‘¬ “x
Da.7
ƒ
h ƒ
E ƒ
F ƒ
‹ ƒ
^ ƒ
C ƒ
€
Da.8
Mƒ
R [ ƒ
h
Da.9
ˆÊ ’u Œ
ˆ
‚Я ¯ •К q
Da.1@ ` @ Da.4
²‚
P
ˆÊ ’u Œ
ˆ
‚ß ƒ
A ƒ
h ƒ
Œ ƒ
X
Da.5
‰
~
Œ
Ê
ƒ
A ƒ
h ƒ
Œ ƒ
X
Da.6
w —
ß
‘¬ “x
Da.7
ƒ
h ƒ
E ƒ
F ƒ
‹ ƒ
^ ƒ
C ƒ
€
Da.8
Mƒ
R [ ƒ
h
Da.9
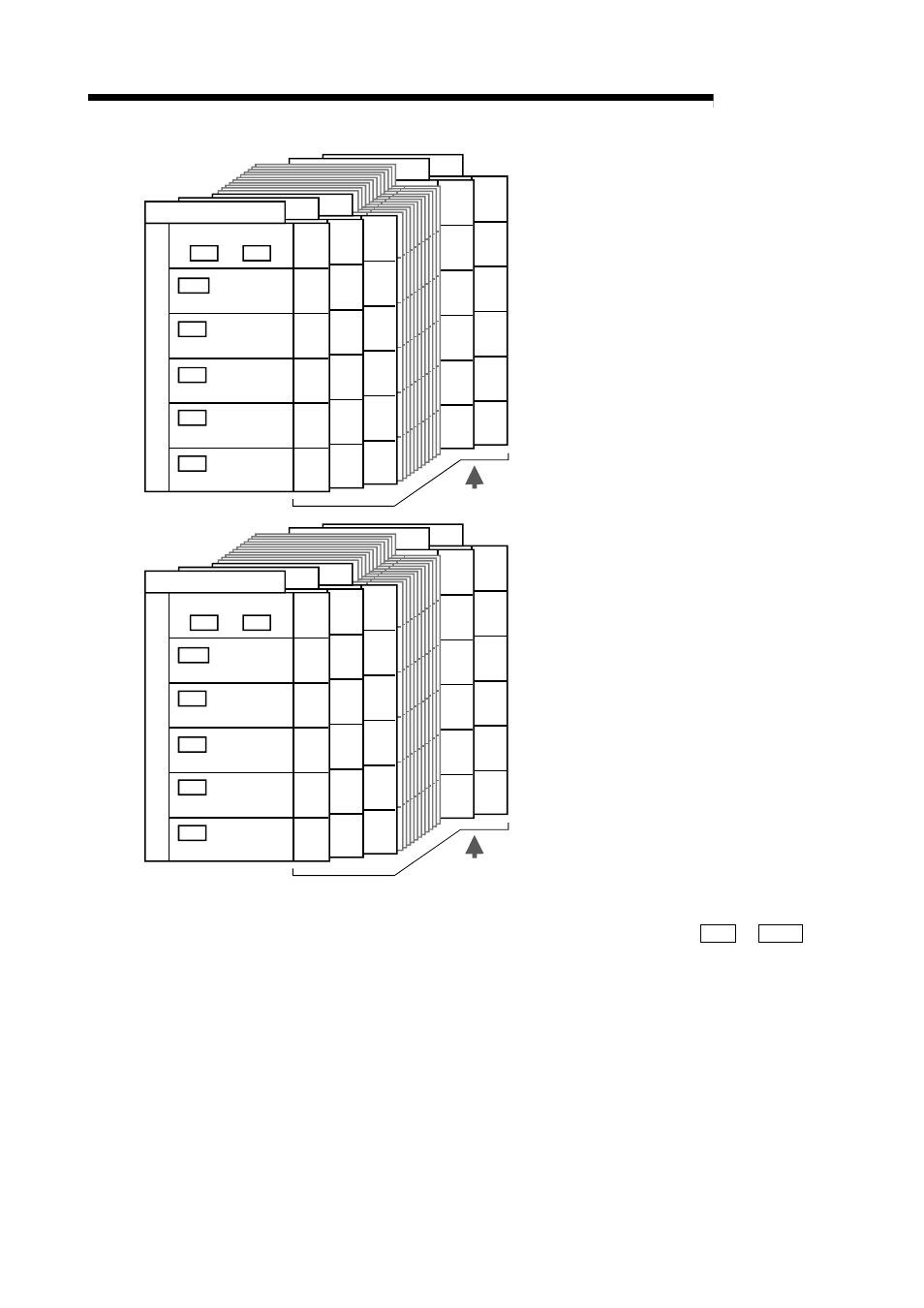
Ax
is
3
Positioning identifier
Da.1 to Da.5
Positioning address/
movement amount
Da.6
Arc address
Da.7
Command speed
Da.8
Dwell time
Da.9
M code
Da.10
Positioning data No. 1
14000
14001
14002
14004
14005
14006
14007
14008
14009
14010
14011
14012
14014
14015
14016
14017
14018
14019
14020
14021
14022
14024
14025
14026
14027
14028
14029
19980
19981
19982
19984
19985
19986
19987
19988
19989
19990
19991
19992
19994
19995
19996
19997
19998
19999
Buffer memory address
2
3
600
599
ˆÊ ’u Œ
ˆ
‚Я ¯ •К q
Da.1@ ` @ Da.4
²‚
P
ˆÊ ’u Œ
ˆ
‚ß ƒ
A ƒ
h ƒ
Œ ƒ
X
Da.5
‰
~
Œ
Ê
ƒ
A ƒ
h ƒ
Œ ƒ
X
Da.6
w —
ß
‘¬ “x
Da.7
ƒ
h ƒ
E ƒ
F ƒ
‹ ƒ
^ ƒ
C ƒ
€
Da.8
Mƒ
R [ ƒ
h
Da.9
ˆÊ ’u Œ
ˆ
‚Я ¯ •К q
Da.1@ ` @ Da.4
²‚
P
ˆÊ ’u Œ
ˆ
‚ß ƒ
A ƒ
h ƒ
Œ ƒ
X
Da.5
‰
~
Œ
Ê
ƒ
A ƒ
h ƒ
Œ ƒ
X
Da.6
w —
ß
‘¬ “x
Da.7
ƒ
h ƒ
E ƒ
F ƒ
‹ ƒ
^ ƒ
C ƒ
€
Da.8
Mƒ
R [ ƒ
h
Da.9
ˆÊ ’u Œ
ˆ
‚Я ¯ •К q
Da.1@ ` @ Da.4
²‚
P
ˆÊ ’u Œ
ˆ
‚ß ƒ
A ƒ
h ƒ
Œ ƒ
X
Da.5
‰
~
Œ
Ê
ƒ
A ƒ
h ƒ
Œ ƒ
X
Da.6
w —
ß
‘¬ “x
Da.7
ƒ
h ƒ
E ƒ
F ƒ
‹ ƒ
^ ƒ
C ƒ
€
Da.8
Mƒ
R [ ƒ
h
Da.9
ˆÊ ’u Œ
ˆ
‚Я ¯ •К q
Da.1@ ` @ Da.4
²‚
P
ˆÊ ’u Œ
ˆ
‚ß ƒ
A ƒ
h ƒ
Œ ƒ
X
Da.5
‰
~
Œ
Ê
ƒ
A ƒ
h ƒ
Œ ƒ
X
Da.6
w —
ß
‘¬ “x
Da.7
ƒ
h ƒ
E ƒ
F ƒ
‹ ƒ
^ ƒ
C ƒ
€
Da.8
Mƒ
R [ ƒ
h
Da.9
Positioning identifier
Da.1 to Da.5
Positioning address/
movement amount
Da.6
Arc address
Da.7
Command speed
Da.8
Dwell time
Da.9
M code
Da.10
20000
20001
20002
20004
20005
20006
20007
20008
20009
20010
20011
20012
20014
20015
20016
20017
20018
20019
20020
20021
20022
20024
20025
20026
20027
20028
20029
25980
25981
25982
25984
25985
25986
25987
25988
25989
25990
25991
25992
25994
25995
25996
25997
25998
25999
Positioning data No. 1
2
3
600
599
Ax
is
4
Buffer memory address
The descriptions that follow relate to the positioning data set items Da.1 to
Da.10
.
(The buffer memory addresses shown are those of the "positioning data No. 1" for the
axes 1 to 4.)