Melsec-q, 5 data used for positioning control – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 136
5 - 48
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
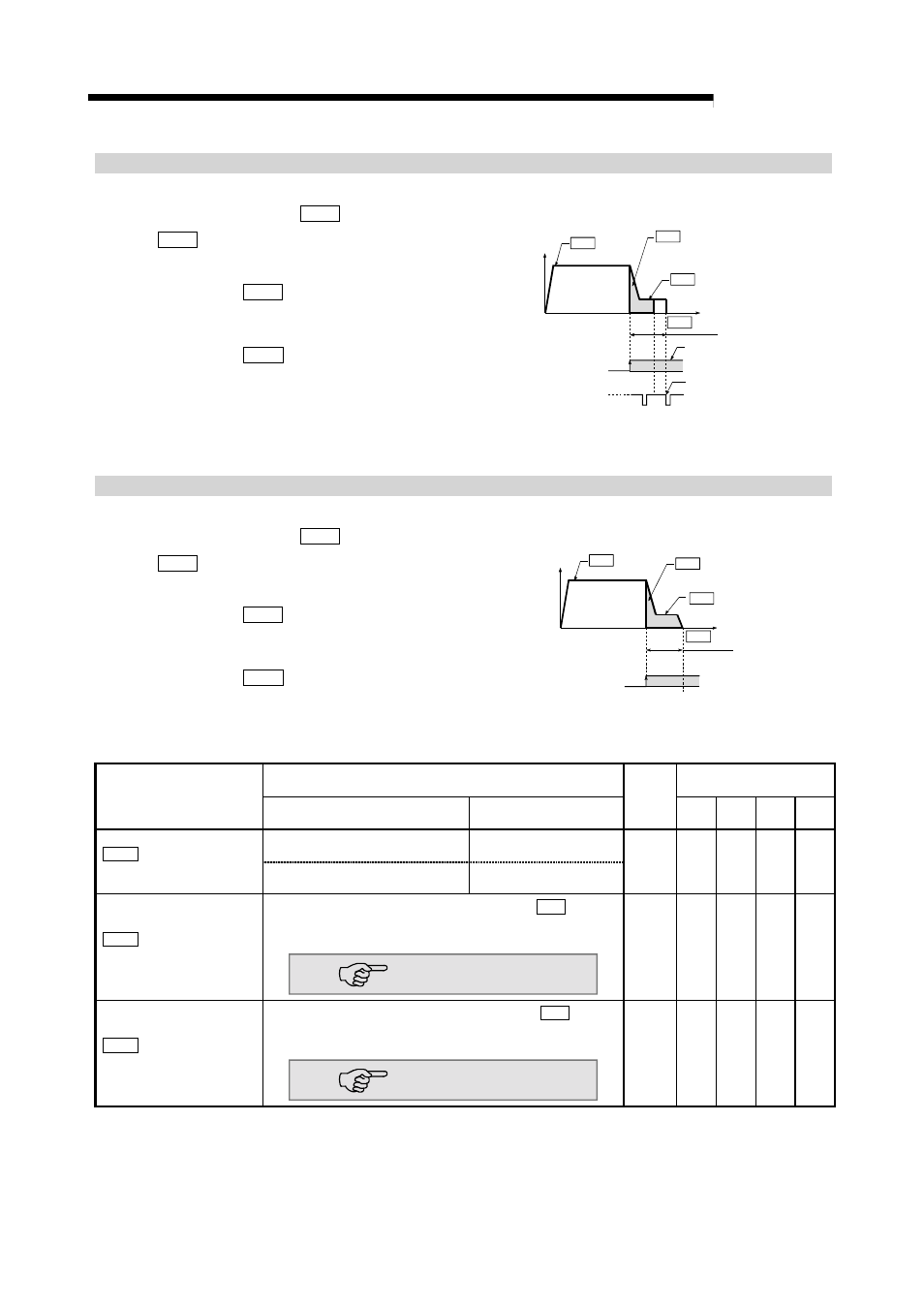
4 : Count method 1)
(1) Start machine OPR.
(Start movement at the "
Pr.46
OPR speed" in the
"
Pr.44
OPR direction".)
(2) Detect the near-point dog ON, and start deceleration.
(3) Decelerate to "
Pr.47
Creep speed", and move with the
creep speed.
(4) After the near-point dog turns ON and the movement
amount set in "
Pr.50
Setting for the movement amount
after near-point dog ON" has passed, the pulse output from
the QD75 stops with the first zero signal (one pulse output
at one motor revolution), and the machine OPR is
completed.
t
V
ON
(4)
(3)
(2)
(1)
Near-point dog OFF
Zero signal
OPR speed
Pr.46
Pr.47 Creep speed
Pr.50
Setting for the movement
amount after near-poing dog ON
First zero signal after moving the
movement amount after near-
point dog ON
Movement amount after
near-point dog ON
Md.34
The near-point dog must turn OFF
at a sufficient distance away from
the OP position.
5 : Count method 2)
(1) Start machine OPR.
(Start movement at the "
Pr.46
OPR speed" in the
"
Pr.44
OPR direction".)
(2) Detect the near-point dog ON, and start deceleration.
(3) Decelerate to "
Pr.47
Creep speed", and move with the
creep speed.
(4) After the near-point dog turns ON and the movement
amount set in "
Pr.50
Setting for the movement amount
after near-point dog ON" has passed, the pulse output from
the QD75 stops with the first zero signal, and the machine
OPR is completed.
t
V
ON
(1)
(2)
(3)
(4)
Near-point dog OFF
Movement amount after
near-point dog ON
Md.34
OPR speed
Pr.46
Pr.47 Creep speed
Pr.50
Setting for the movement
amount after near-poing dog ON
Setting value, setting range
Setting value buffer memory
address
Item
Value set with peripheral device
Value set with sequence
program
Default
value
Axis 1 Axis 2 Axis 3 Axis 4
0 : Positive direction (address
increment direction)
0
Pr.44
OPR direction
1 : Negative direction (address
decrement direction)
1
0
71
221
371
521
Pr.45
OP address
The setting value range differs depending on the "
Pr.1
Unit
setting".
Here, the value within the [Table 1] range is set.
[Table 1] on right page
0
72
73
222
223
372
373
522
523
Pr.46
OPR speed
The setting value range differs depending on the "
Pr.1
Unit
setting".
Here, the value within the [Table 2] range is set.
[Table 2] on right page
1
74
75
224
225
374
375
524
525