Melsec-q, 5 data used for positioning control, Da.8 command speed – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 158
5 - 70
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
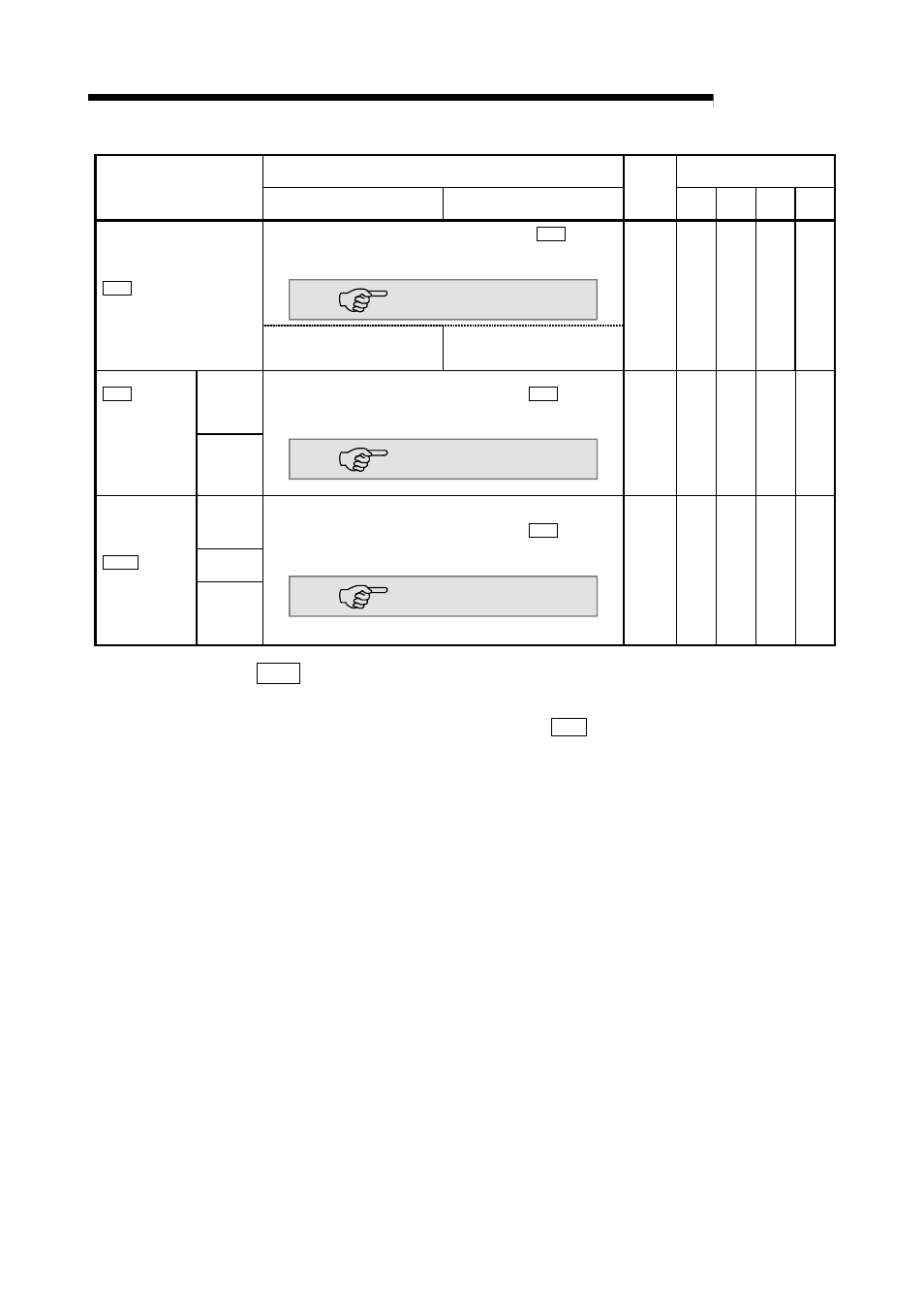
Setting value, setting range
Setting value buffer memory
address
Item
Value set with peripheral device
Value set with sequence
program
Default
value
Axis 1 Axis 2 Axis 3 Axis 4
The setting value range differs depending on the "
Pr.1
Unit
setting".
Here, the value within the [Table 1] range is set.
[Table 1] on right page
Da.8
Command speed
-1: Current speed
(Speed set for previous
positioning data No.)
-1
0
2004
2005
8004
8005
14004
14005
20004
20005
Dwell time
Da.9
Dwell time/
JUMP
destination
positioning data
No.
JUMP
destination
positioning
data No.
The setting value range differs according to the "
Da.2
Control
system".
Here, the value within the [Table 2] range is set.
[Table 2] on right page
0
2002
8002 14002 20002
M code
Condition
data No.
Da.10
M code
No. of
LOOP to
LEND
repetitions
The setting value range differs according to the "
Da.2
Control
system".
Here, the value within the [Table 3] range is set.
[Table 3] on right page
0
2001
8001 14001 20001
Da.8 Command speed
Set the command speed for positioning.
(1) If the set command speed exceeds " Pr.8 Speed limit value", positioning will
be carried out at the speed limit value.
(2) If "-1" is set for the command speed, the current speed (speed set for previous
positioning data No.) will be used for positioning control. Use the current
speed for uniform speed control, etc. If "-1" is set for continuing positioning
data, and the speed is changed, the following speed will also change.
(Note that when starting positioning, if the "-1" speed is set for the positioning
data that carries out positioning control first, the error "No command speed"
(error code: 503) will occur, and the positioning will not start.
Refer to Section 15.2 "List of errors" for details on the errors.)