Melsec-q, Appendices – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 727
Appendix - 85
MELSEC-Q
APPENDICES
POSITIONING CONTINUED
Refer to the section of term "operation
pattern".
POSITIONING DATA
This is data for the user to carry out
positioning. The No. of points to which
positioning is carried out (the No. of
addresses) is designated by the user. In the
QD75, these are 600 points.
As a principle, positioning is executed in the
order of the data Nos.
POSITIONING PARAMETER
This is basic data for carrying out positioning
control. Types of data include control unit,
movement amount per pulse, speed limit
value, upper and lower stroke limit values,
acceleration/deceleration time, positioning
system, etc.
Parameters have an initial value, so that value
is changed to match the control conditions.
POSITIONING START
This refers the act of designating a target data
No. and starting the positioning.
The operation after the positioning is complete
for that data No. is determined by the data
No.'s positioning pattern.
PTP Control (Point To Point Control)
This is a type of positioning control. With this
control method, the points to be passed are
designated at random locations on the path.
Movement only to a given target positioning is
requested. Path control is not required during
movement from a given point to the next value.
PULSE
The turning ON and OFF of the current
(voltage) for short periods. A pulse train is a
series of pulses. The QD75 is the module that
generates the pulses.
PULSE GENERATOR
This is a device that generates pulses.
Examples include devices installed on the
motor shaft that create pulses when the shaft
rotates, and digital devices.
1-phase types output one pulse train. 2-phase
types output two pulse trains with a phase
difference. From 600 to 1,000,000 pulses can
be output per shaft rotation. Generators with a
ZERO signal function to output 1 or 2 pulses
per shaft rotation. Abbreviated as PLG.
Refer to the term "ENCODER".
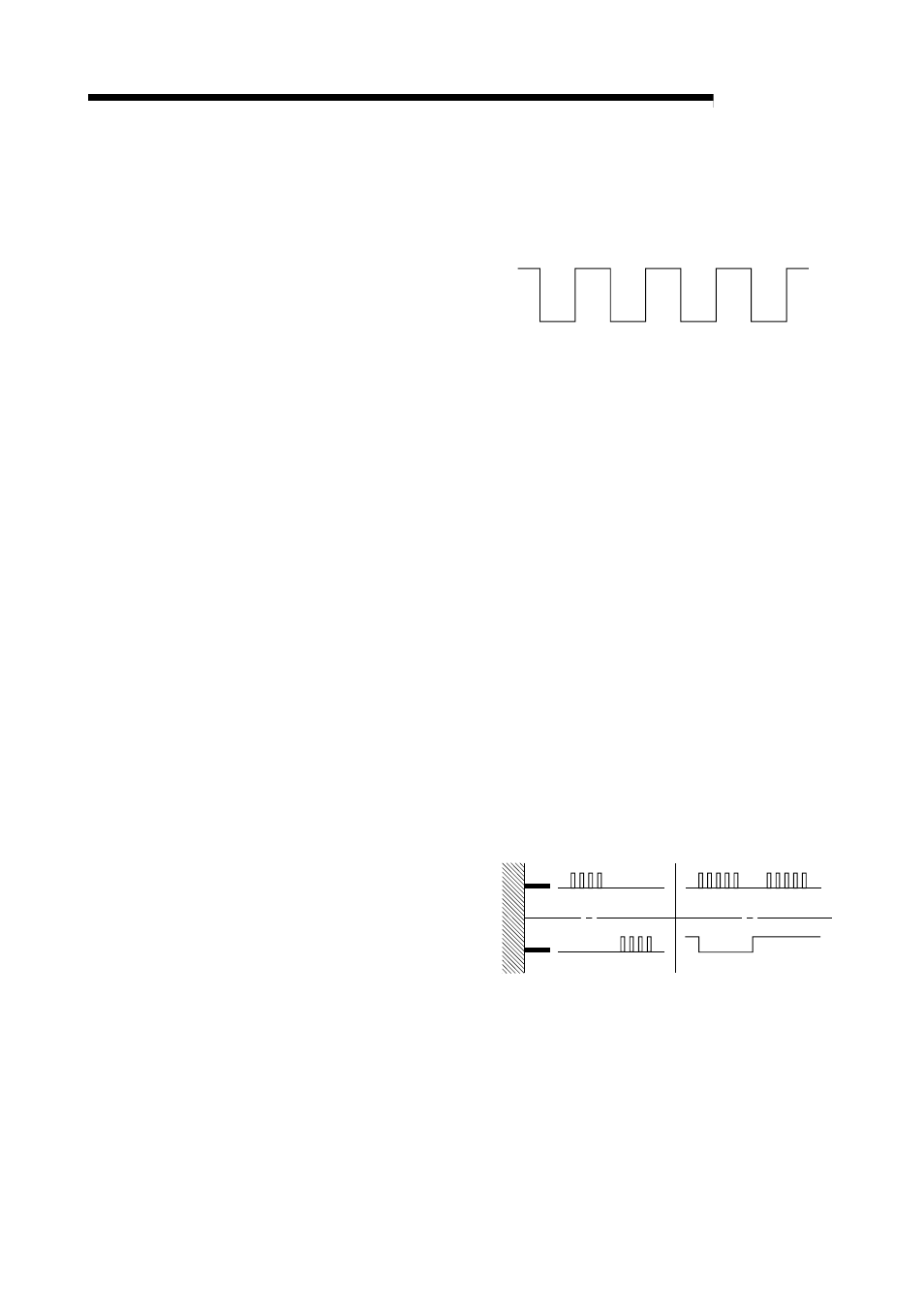
PULSE OUTPUT MODE
There are two methods used to issue forward
run and reverse run commands to the
servomotor. The type used differs according to
the machine maker. In type A, the forward run
pulses and reverse run pulses are output from
separate terminals.
In type B, the forward run pulses and reverse
run pulses are output from the same terminal,
and a forward/reverse run identification signal
is output from another terminal.
Forward
Reverse
Terminal
A type
B type
Reverse
Forward