Melsec-q, Appendices – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 703
Appendix - 61
MELSEC-Q
APPENDICES
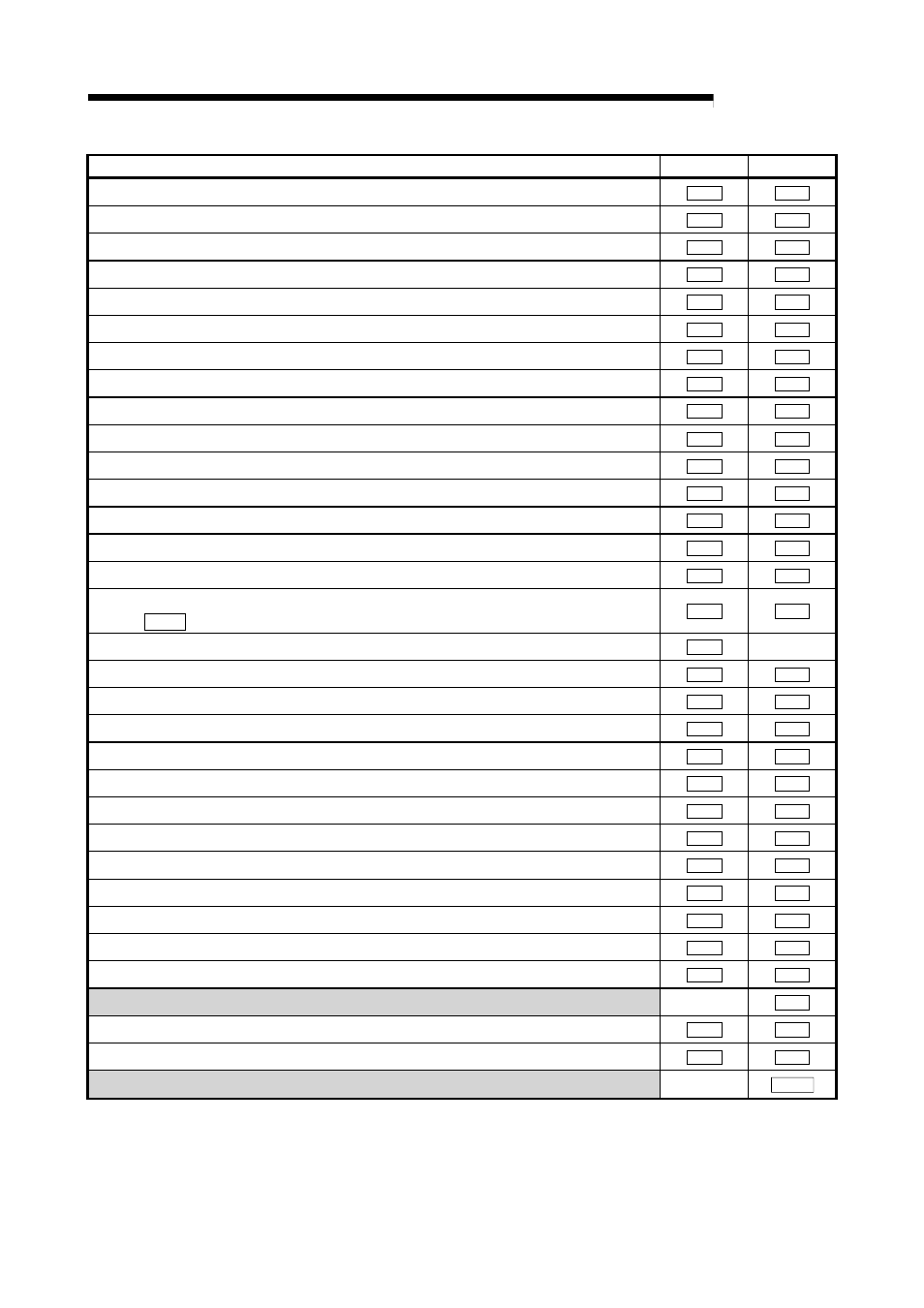
Item
A1SD75
QD75
Acceleration time 3
Pr.28
Pr.27
Deceleration time 1
Pr.29
Pr.28
Deceleration time 2
Pr.30
Pr.29
Deceleration time 3
Pr.31
Pr.30
JOG speed limit value
Pr.32
Pr.31
JOG operation acceleration time selection
Pr.33
Pr.32
JOG operation deceleration time selection
Pr.34
Pr.33
Acceleration/deceleration process selection
Pr.35
Pr.34
S-pattern proportion
Pr.36
Pr.35
Sudden stop deceleration time
Pr.37
Pr.36
Stop group 1 sudden stop selection
Pr.38
Pr.37
Stop group 2 sudden stop selection
Pr.39
Pr.38
Stop group 3 sudden stop selection
Pr.40
Pr.39
Positioning complete signal output time
Pr.41
Pr.40
Allowable circular interpolation error width
Pr.42
Pr.41
External start function selection
(QD75: Pr.42 External command function selection)
Pr.43
Pr.42
Near pass mode selection for path control
Pr.44
–
OPR method
Pr.45
Pr.43
OPR direction
Pr.46
Pr.44
OP address
Pr.47
Pr.45
OPR speed
Pr.48
Pr.46
Creep speed
Pr.49
Pr.47
OPR retry
Pr.50
Pr.48
OPR dwell time
Pr.51
Pr.49
Setting for the movement amount after near-point dog ON
Pr.52
Pr.50
OPR acceleration time selection
Pr.53
Pr.51
OPR deceleration time selection
Pr.54
Pr.52
OP shift amount
Pr.55
Pr.53
OPR torque limit value
Pr.56
Pr.54
Deviation counter clear signal output time
–
Pr.55
Speed designation during OP shift
Pr.57
Pr.56
Dwell time during OPR retry
Pr.58
Pr.57
Speed-position function selection
–
Pr.150