Melsec-q, 5 data used for positioning control – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 215
5 - 127
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
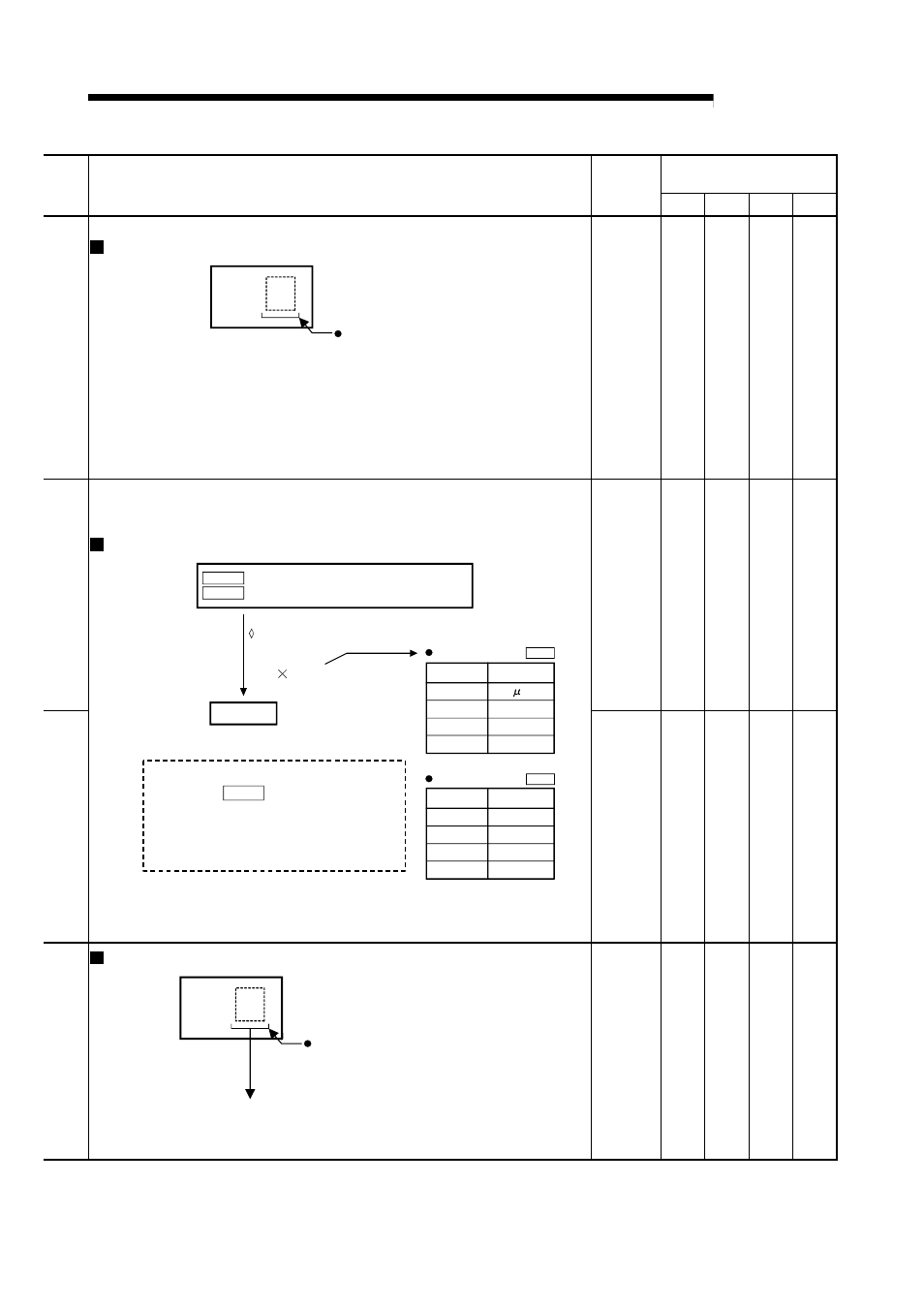
Storage buffer
memory address
Setting value
Default
value
Axis 1 Axis 2 Axis 3 Axis 4
Set with a decimal.
Setting value
K
Position-speed switching
enable flag
0: Position control will not be taken
over by speed control even when the
external command signal comes ON.
1: Position control will be taken
over by speed control when the
external command signal comes ON.
0
1532
1632
1732
1832
0
1534
1535
1634
1635
1734
1735
1834
1835
Set with a decimal.
Actual value
R
Setting value
(Decimal)
10
n
n
-1
m
-5
inch
-5
degree
0
pulse
Unit
n
-2
mm/min
-3
inch/min
-3
degree/min
0
pulse/s
Unit
Conversion into an integer value
Unit conversion table ( Cd.27 )
Unit conversion table ( Cd.28 )
Cd. 27 Target position change value (address)
Cd. 28 Target position change value (speed)
Example: If " Cd. 28 Target position change
value (speed) is set as "10000.00
mm/min", the buffer memory stores
"1000000".
0
1536
1537
1636
1637
1736
1737
1836
1837
Set with a decimal.
Setting
value
K
Target position change request flag
1: Requests a change in the target position
The QD75 resets the value to "0" automatically
when the new target position value has been written.
(This indicates the completion of write operation.)
1
0
1538
1638
1738
1838