Melsec-q, 5 data used for positioning control, Pr.45 op address – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 138: Pr.46 opr speed
5 - 50
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
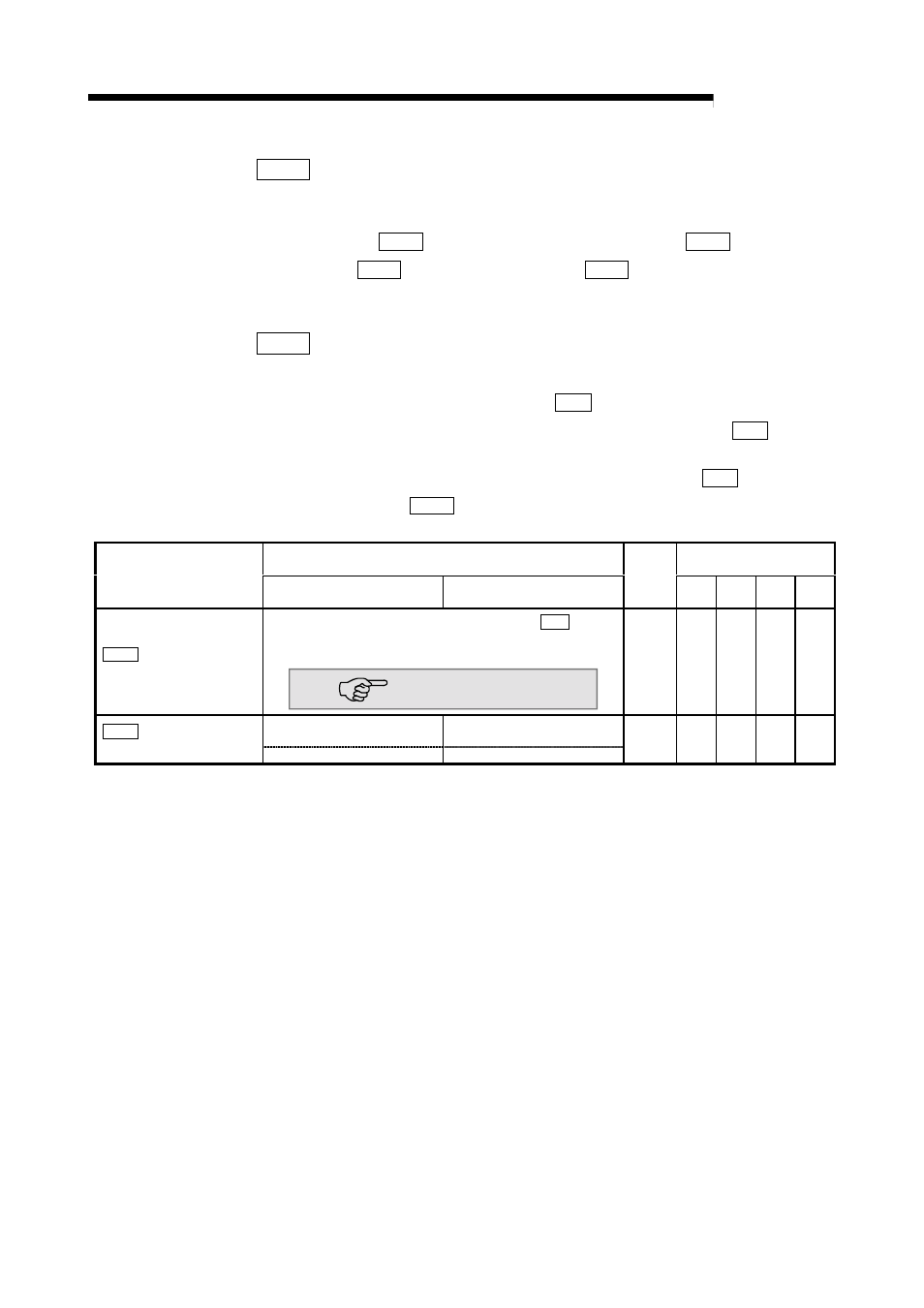
Pr.45 OP address
Set the address used as the reference point for positioning control (ABS system).
(When the machine OPR is completed, the stop position address is changed to the
address set in "
Pr.45
OP address". At the same time, the "
Pr.45
OP address"
is stored in "
Md.20
Current feed value" and "
Md.21
Machine feed value".)
Pr.46 OPR speed
Set the speed for OPR.
Note) Set the "OPR speed" to less than " Pr.8 Speed limit value". If the "speed
limit value" is exceeded, the "OPR speed" will be limited by " Pr.8 Speed
limit value".
The "OPR speed" should be equal to or faster than the " Pr.7 Bias speed
at start" and "
Pr.47
Creep speed".
Setting value, setting range
Setting value buffer memory
address
Item
Value set with peripheral device
Value set with sequence
program
Default
value
Axis 1 Axis 2 Axis 3 Axis 4
Pr.47
Creep speed
The setting value range differs depending on the "
Pr.1
Unit
setting".
Here, the value within the [Table 1] range is set.
[Table 1] on right page
1
76
77
226
227
376
377
526
527
0 : Do not retry OPR with limit
switch
0
Pr.48
OPR retry
1 : Retry OPR with limit switch
1
0
78
228
378
528