Melsec-q – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 504
12 - 28
MELSEC-Q
12 CONTROL SUB FUNCTIONS
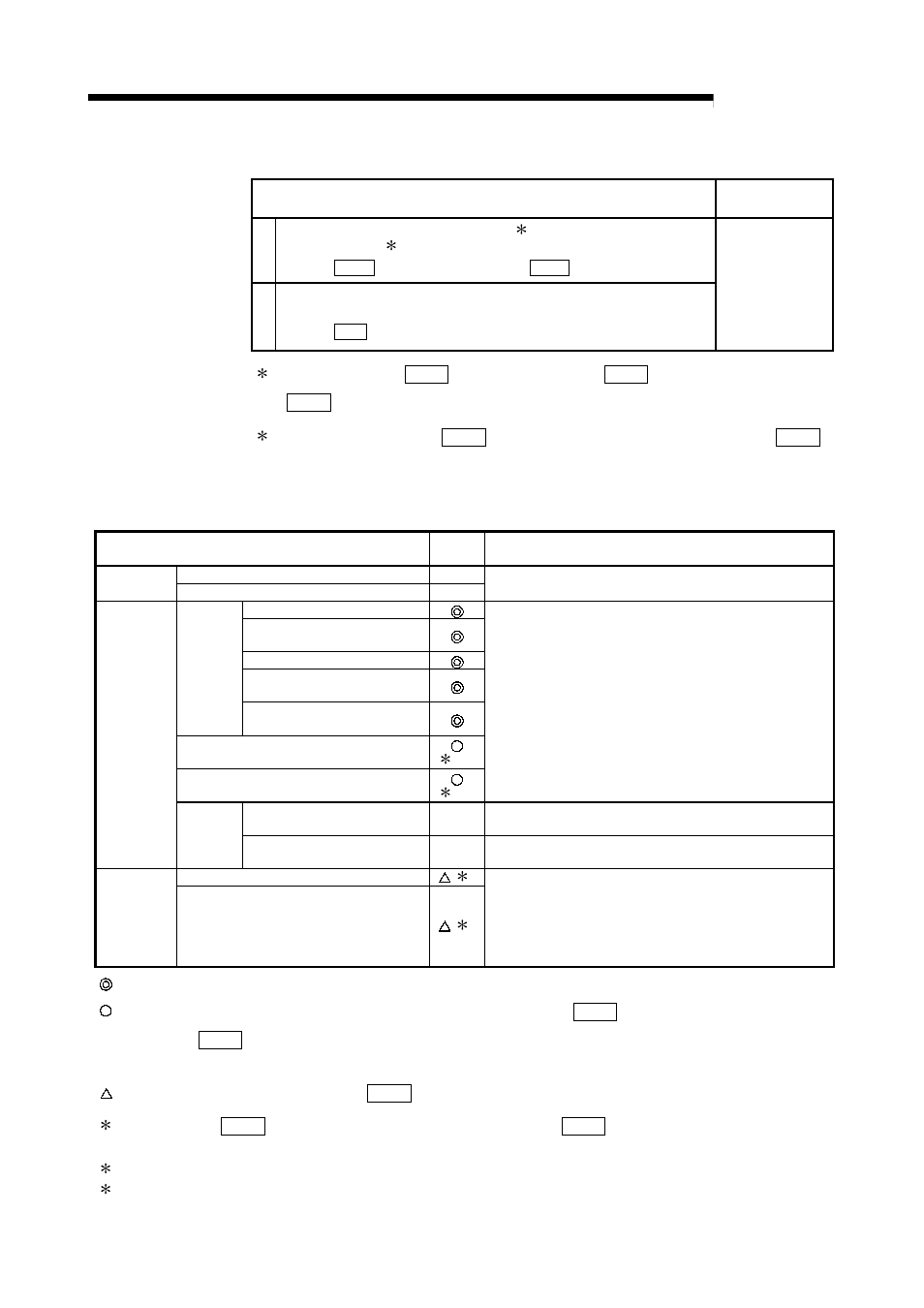
[2] Software stroke limit check details
Check details
Processing when
an error occurs
1)
An error shall occur if the current value 1 is outside the software
stroke limit range 2.
(Check "
Md.20
Current feed value" or "
Md.21
Machine feed value".)
2)
An error shall occur if the command address is outside the software
stroke limit range.
(Check "
Da.6
Positioning address/movement amount".)
An "axis error" will
occur (error code:
507, 508)
1Check whether the " Md.20 Current feed value" or " Md.21 Machine feed value" is set in
" Pr.14 Software stroke limit selection".
2Moveable range from the " Pr.12 Software stroke limit upper limit value" to the " Pr.13
Software stroke limit lower limit value".
[3] Relation between the software stroke limit function and various
controls
Control type
Limit
check
Processing at check
Machine OPR control
–
OPR control
Fast OPR control
–
Check not carried out.
1-axis linear control
2 to 4-axes axis linear
interpolation control
1-axis fixed-feed control
2 to 4-axes fixed-feed control
(interpolation)
Position
control
2-axis circular interpolation
control
1 to 4-axes speed control
3, 4
Speed-position switching control
Position-speed switching control
3, 4
Checks 1) and 2) in the previous section [2] are carried
out.
For speed control:
The axis decelerates to a stop when
it exceeds the software stroke limit
range.
For position control: The axis comes to an immediate
stop when it exceeds the software
stroke limit range.
Current value changing
–
The current value will not be changed if the new current
value is outside the software stroke limit range.
Major
positioning
control
Other
control
JUMP instruction, NOP
instruction, LOOP to LEND
–
Check not carried out.
JOG operation, Inching operation
5
Manual
control
Manual pulse generator operation
5
Check 1) in the previous section [2] is carried out.
The machine will carry out a deceleration stop when the
software stroke limit range is exceeded. If the address
falls out of the software stroke limit range, the operation
can be started only toward the movable range after an
error reset.
: Check valid
: Check is not made when the current feed value is not updated (Refer to Pr.21 ) at the setting of " current feed
value" in " Pr.14 Software stroke limit selection" during speed control.
–
: Check not carried out (check invalid).
: Valid only when "1:valid" is set in the " Pr.15 Software stroke limit valid/invalid setting".
3 : The value in " Md.20 Current feed value" will differ according to the " Pr.21 Current feed value during speed
control" setting.
4: When the unit is "degree", check is not made during speed control.
5: When the unit is "degree", check is not carried out.