Melsec-q, 15 troubleshooting – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 612
15 - 8
MELSEC-Q
15 TROUBLESHOOTING
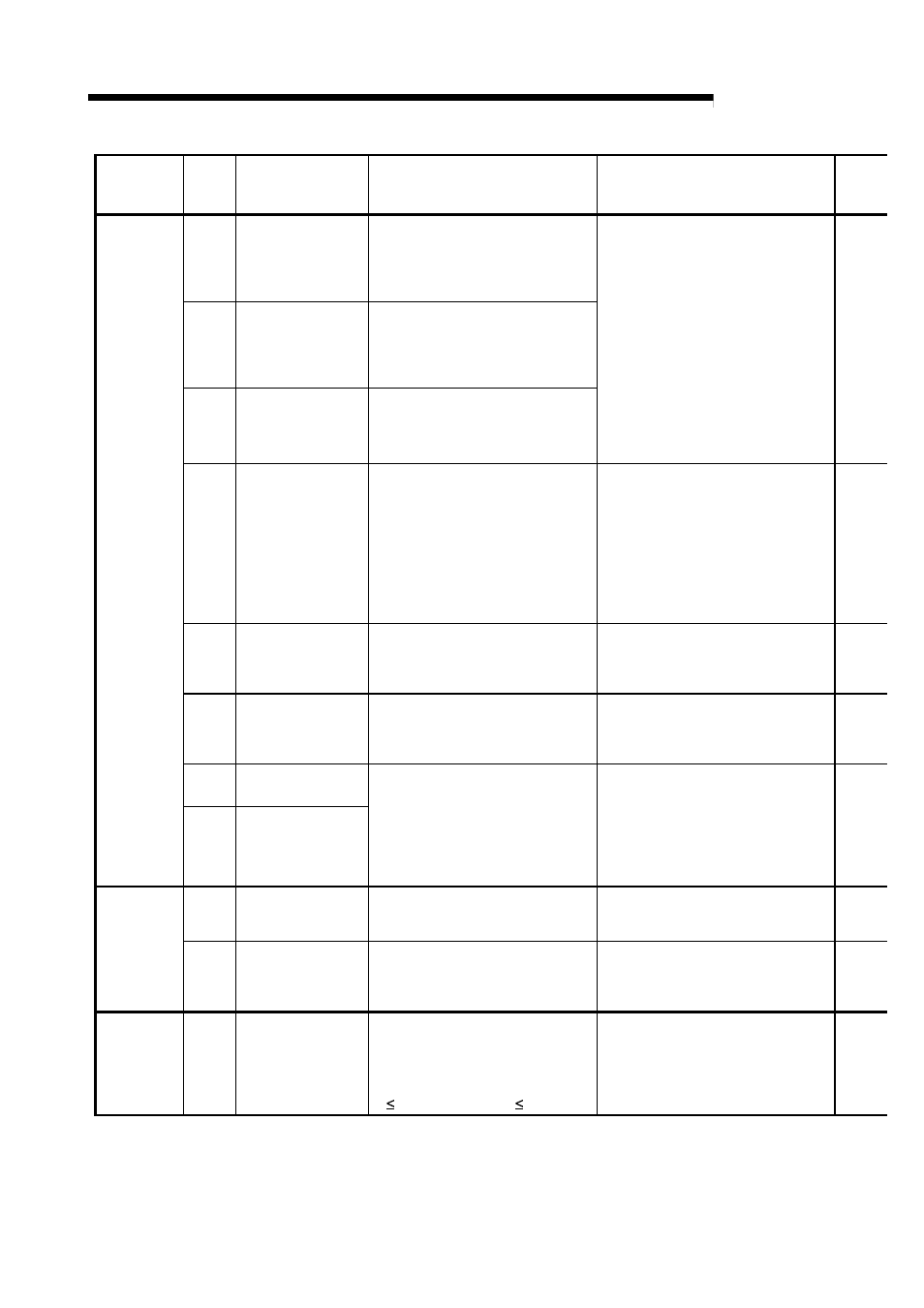
Classification
of errors
Error
code
Error name
Error
Operation status at error occurrence
203
Dog detection timing
fault
The near-point dog signal is turned
OFF during the deceleration from an
OPR speed to a creep speed by the
near-point dog machine OPR.
204
OP detection timing
fault
The zero signal is turned OFF during
the deceleration from an OPR speed
to a creep speed by the stopper
method 2)-OPR.
205
Dwell time fault
A dwell time is passed during the
deceleration from a creep speed to a
OPR speed by the stopper method
1)-OPR.
The system stops with the setting
(deceleration stop/sudden stop) of the
detailed parameter 2 Sudden stop
selection (stop group 3).
(Note that the deceleration stop only
occurs during the manual pulse
generator operation.)
206
Count method
movement amount
fault
In the count method 1 and 2
machine OPR, a parameter "Setting
of movement amount after near-
point dog ON" is smaller than a
distance necessary for deceleration
stop from an OPR speed.
The machine OPR is not started.
207
OPR request ON
The OPR request flag is turned ON
when a fast-OPR is started
(positioning start No. 9002).
The fast OPR is not started.
209
OPR restart not
possible
The restart command is turned ON
after the machine OPR is stopped
using a stop signal.
The restart is not carried out.
213
ABS transmission
time
OPR
214
ABS transmission
SUM
Communication cannot be carried
out with the servo-amplifier using an
absolute position restoration
instruction.
The absolute position restoration is
not carried out.
300
Outside JOG speed
range
At the time of JOG starting, the JOG
speed comes out of a specified
range.
The JOG operation is not carried out
when the JOG speed is outside the
setting range at the time of JOG start.
JOG inching
301
Inching movement
amount error
The inching movement amount
exceeds the JOG speed limit.
The inching operation is not carried
out when the inching movement
amount exceeds a JOG speed limit at
the time of inching start.
Positioning
operation
500
Illegal condition data
No.
The condition data No. is outside the
setting range when a block using the
condition data is started by a special
starting (conditional start, wait start,
simultaneous start, FOR (condition)).
(1 Condition data No. 10)
The operation is terminated.