Melsec-q, Operation chart – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 331
9 - 31
MELSEC-Q
9 MAJOR POSITIONING CONTROL
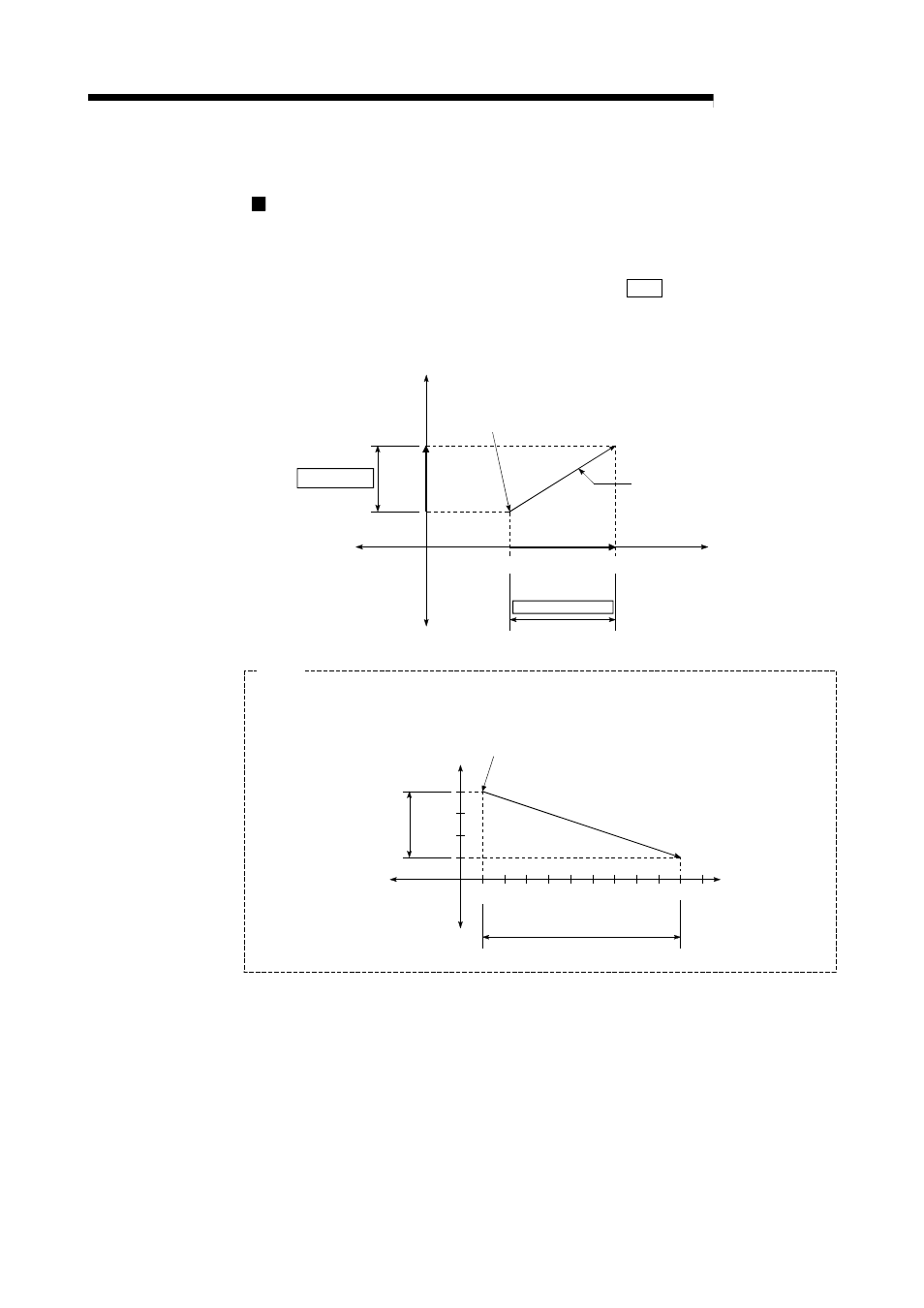
[2] 2-axis linear interpolation control (INC linear 2)
Operation chart
In incremental system 2-axis linear interpolation control, addresses established by
a machine OPR on a 2-axis coordinate plane are used. Linear interpolation
positioning is carried out from the current stop position (start point address) to a
position at the end of the movement amount set in " Da.6 Positioning
address/movement amount". The movement direction is determined by the sign of
the movement amount.
X
1
X
2
Y
1
Y
2
Reverse direction
Forward direction (X axis)
Reverse direction
Forward direction (Y axis)
Movement by linear interpolation
positioning of the X axis and Y axis
Start point address (X
1
,Y
1
)
(current stop position)
Y axis movement
X axis movement amount
amount
Example
5000
10000
Axis 2 movement amount
(-3000)
4000
1000
Axis 2
Axis 1
0
(current stop position)
Stop address after the
positioning control
When the axis 1 movement amount is 9000 and the axis 2 movement amount is -3000, positioning
is carried out as follows.
Axis 1 movement amount (9000)
Start point address
1000