2 list of devices used, Melsec-q – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 225
6 - 5
MELSEC-Q
6 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL
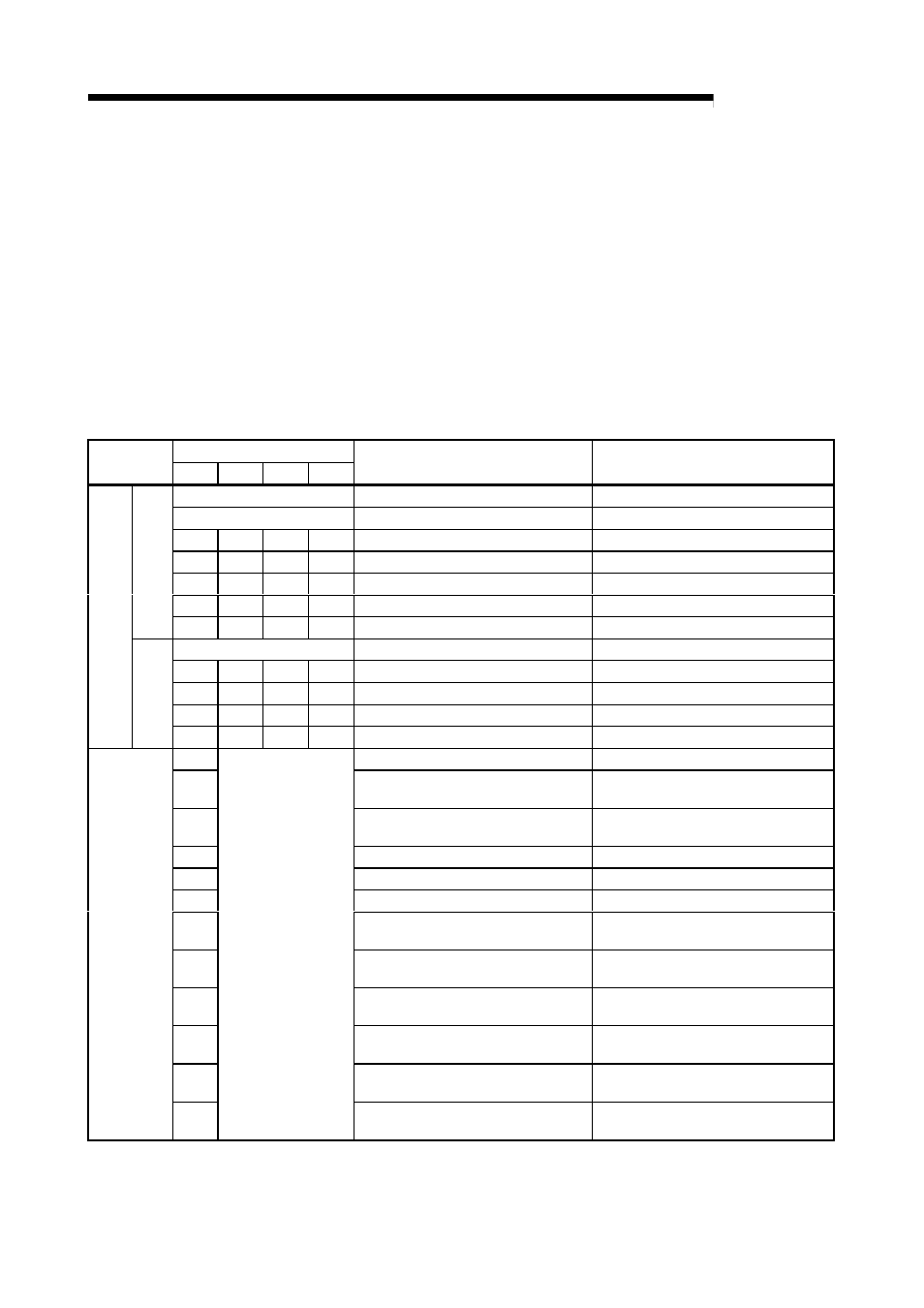
6.2 List of devices used
In the sequence programs shown in this chapter and subsequent, the application of the
devices used are as follows.
The I/O numbers for QD75 indicate those when QD75 is mounted in the 0-slot of the
main base.
If it is mounted in the slot other than the 0-slot of the main base, change the I/O
number to that for the position where QD75 was installed.
In addition, change the external inputs, external outputs, internal relays, data resisters,
and timers according to the system used.
(1) Inputs/outputs, external inputs/external outputs, and internal relays
of QD75
Device
Device
name
Axis 1 Axis 2 Axis 3 Axis 4
Application
Details when ON
X0
QD75 READY signal
Preparation completed
X1
Synchronization flag
QD75 buffer memory accessible
X4
X5
X6
X7
M code ON signal
M code outputting
X8
X9
XA
XB
Error detection signal
Error detected
XC
XD
XE
XF
BUSY signal
BUSY (operating)
X10
X11
X12
X13 Start complete signal
Start completed
Input
X14
X15
X16
X17 Positioning complete signal
Positioning completed
Y0
PLC READY signal
PLC CPU preparation completed
Y4
Y5
Y6
Y7
Axis stop signal
Requesting stop
Y8
YA
YC
YE
Forward run JOG start signal
Starting forward run JOG
Y9
YB
YD
YF
Reverse run JOG start signal
Starting reverse run JOG
Inputs/
outputs
of
QD75
Out-
put
Y10
Y11
Y12
Y13 Positioning start signal
Requesting start
X20
OPR request OFF command
Commanding OPR request OFF
X21
External command valid command
Commanding external command valid
setting
X22
External command invalid command
Commanding external command
invalid
X23
Machine OPR command
Commanding machine OPR
X24
Fast OPR command
Commanding fast OPR
X25
Positioning start command
Commanding positioning start
X26
Speed-position switching operation
command
Commanding speed-position switching
operation
X27
Speed-position switching enable
command
Commanding speed-position switching
enable command
X28
Speed-position switching prohibit
command
Commanding speed-position switching
prohibit
X29
Movement amount change command
Commanding movement amount
change
X2A
High-level positioning control start
command
Commanding high-level positioning
control start
External
input
(command)
X2B
—
Positioning start command (dedicated
instruction)
Commanding positioning start