Melsec-q, Appendices – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 739
Appendix - 97
MELSEC-Q
APPENDICES
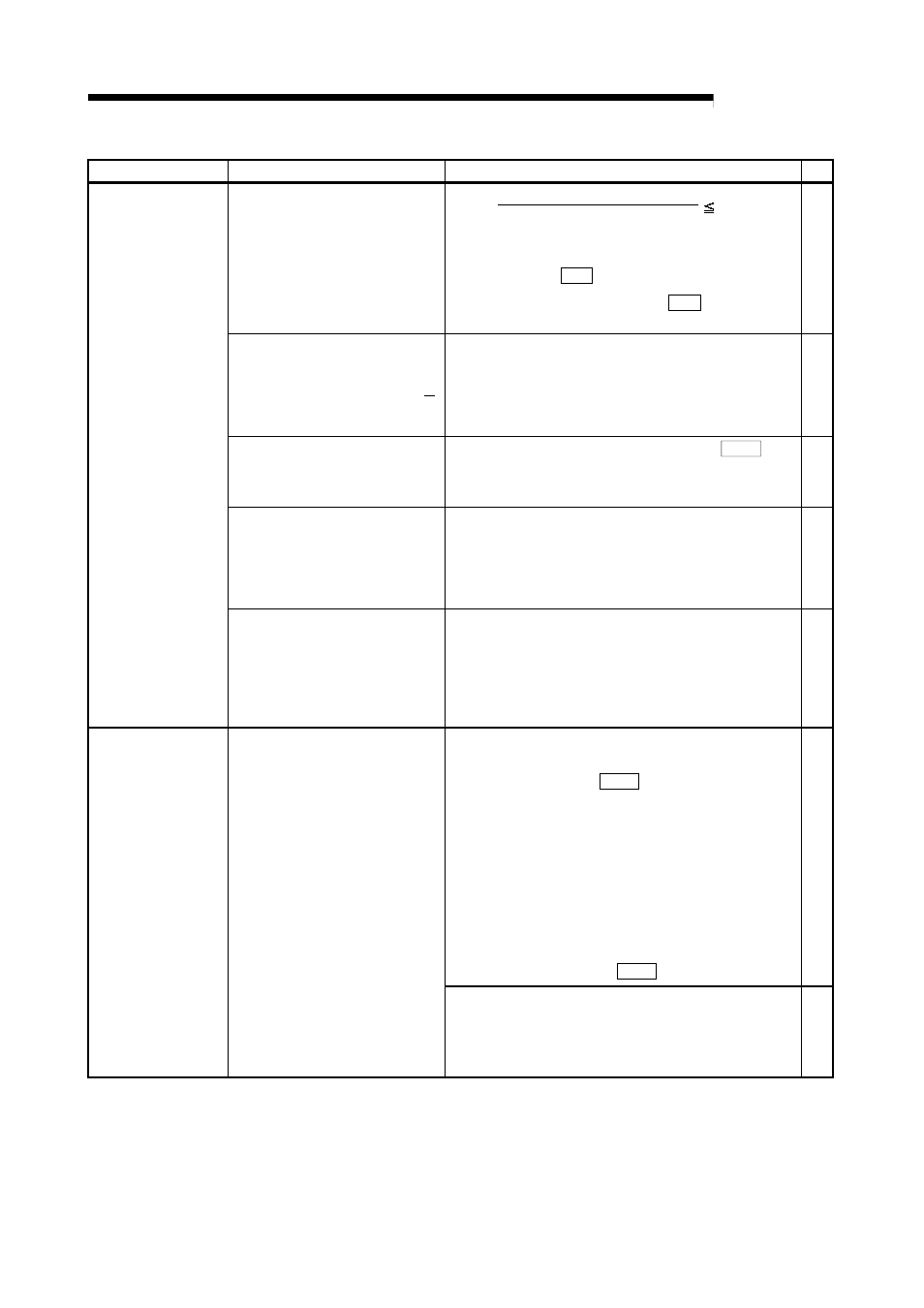
Trouble type
Questions/Trouble
Remedy
No.
Backlash compensation value
0
≤
Movement amount per pulse
255
Error 920 (backlash compensation
amount error) occurs even when
the backlash compensation value
is set to "1".
Setting is not possible if the above equation is not
satisfied.
Adjust by setting "
Pr.4
Unit magnification" to 10-fold (or
100-fold, or 1000-fold), and setting "
Pr.2
Movement
amount per rotation" to 1/10 (or 1/100, or 1/1000).
48
When a JOG operation is
attempted, errors such as error
104 (hardware stroke limit+) or
error 105 (hardware stroke limit )
occur and the machine does not
move.
The hardware stroke limit wiring has probably not been
carried out.
Refer to Section 12.4.4 "Hardware stroke limit function" for
details, and wire accordingly.
49
Error 997 (Speed selection at OP
shift error) appears when the PLC
READY signal [Y0] turns from OFF
to ON.
A value besides "0" or "1" may be set in the "
Pr.56
Speed designation during OP shift".
Review the set sequence program, and reset the correct
parameters.
50
When the start signal was turned
ON immediately after the stop
signal ON, warning 100 (start
during operation) was detected,
and the start was ignored.
The QD75 starts the deceleration stop process when the
stop signal ON is detected. Thus, the machine interprets
that "positioning is still being executed" immediately after
the stop signal ON. Even if the start signal is turned ON at
that time, the start request will be ignored and warning
100 will occur.
51
Error/warning
Does warning 500 (deceleration
and stop speed change) occur
only during "stop deceleration" and
"automatically deceleration"?
Is there any problem if the
operation is continued in that state
without resetting the error?
The warning occurs only at those times mentioned at the
left. Because this is a warning, there is no problem if the
operation can be continued without resetting the error.
(When the speed is changed using the override, the new
value will not be reflected on the data being executed, but
will be reflected from the next start.)
52
Depending on the stop occurrence factor, positioning may
have not been completed normally.
Check the axis monitor "
Md.26
Axis operation status"
after the BUSY signal has turned OFF.
Stop
: The stop signal has turned ON
during positioning.
Check the condition under which the
stop signal (Y stop, external stop)
turns ON.
Error occurrence
: An error has occurred during
positioning.
Check the error occurrence factor
from "
Md.23
Axis error No.".
53
Positioning complete
signal
Position control was executed but
the positioning complete signal
does not turn ON.
The setting value of the detailed parameter 2 "Positioning
complete signal output time" is 0 or shorter than the scan
time.
Using the sequence program, set the time when the signal
can be detected securely.
54