Melsec-q, 5 data used for positioning control – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 209
5 - 121
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
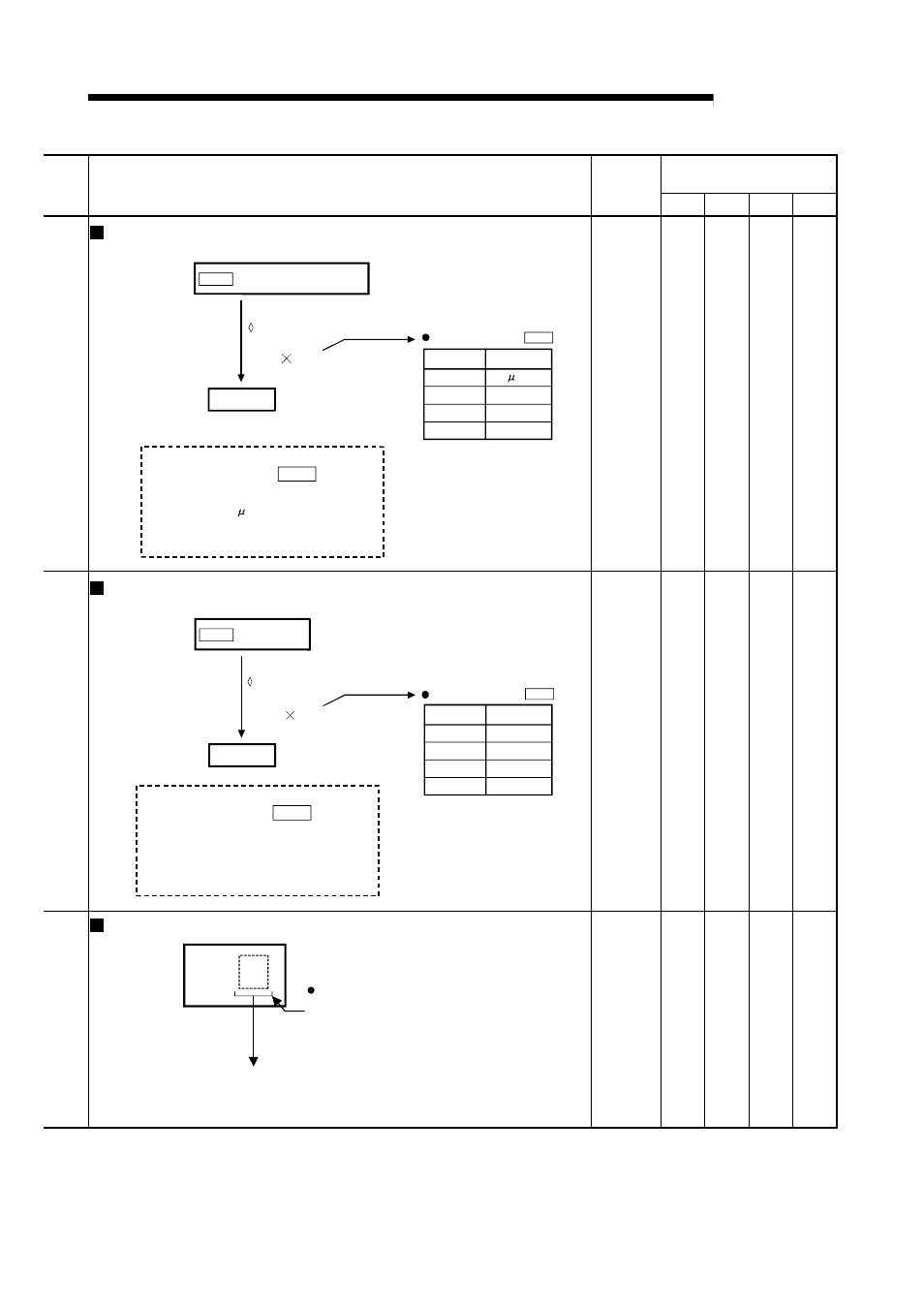
Storage buffer
memory address
Setting value
Default
value
Axis 1 Axis 2 Axis 3 Axis 4
Set with a decimal.
Actual value
Conversion into an integer value
Cd.16 Inching movement amount
10
n
Unit conversion table ( Cd.16 )
n
-1
m
-5
inch
-5
degree
0
pulse
Unit
R
Setting value
(Decimal)
Example: When the " Cd. 16 Inching
movement amount" is set as
"1.0 m", the buffer memory
stores "10".
0
1517
1617
1717
1817
Set with a decimal.
Actual value
Conversion into an integer value
Cd.17 JOG speed
10
n
Unit conversion table ( Cd.17 )
n
-2
mm/min
-3
inch/min
-3
degree/min
0
pulse/s
Unit
R
Setting value
(Decimal)
Example: When the " Cd. 17 JOG
speed" is set as "20000.00mm
/min", the buffer memory
stores "2000000".
0
1518
1519
1618
1619
1718
1719
1818
1819
Set with a decimal.
Setting
value
Interruption request continuous operation
1: Interrupts continuous operation control
or continuous path control.
K
The QD75 resets the value to "0" automatically when the continuous
control interruption request is processed.
(This indicates the completion of continuous operation interruption request.)
1
0
1520
1620
1720
1820