Melsec-q, Remark, Appendix - 37 – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 679: Input signal logic selection" and, And servo amplifier. the qd75d, Is initially set to negative logic, Pr.22, Pr.23
Appendix - 37
MELSEC-Q
APPENDICES
Appendix 4 Connection examples with servo amplifiers manufactured by MITSUBISHI
Electric Corporation
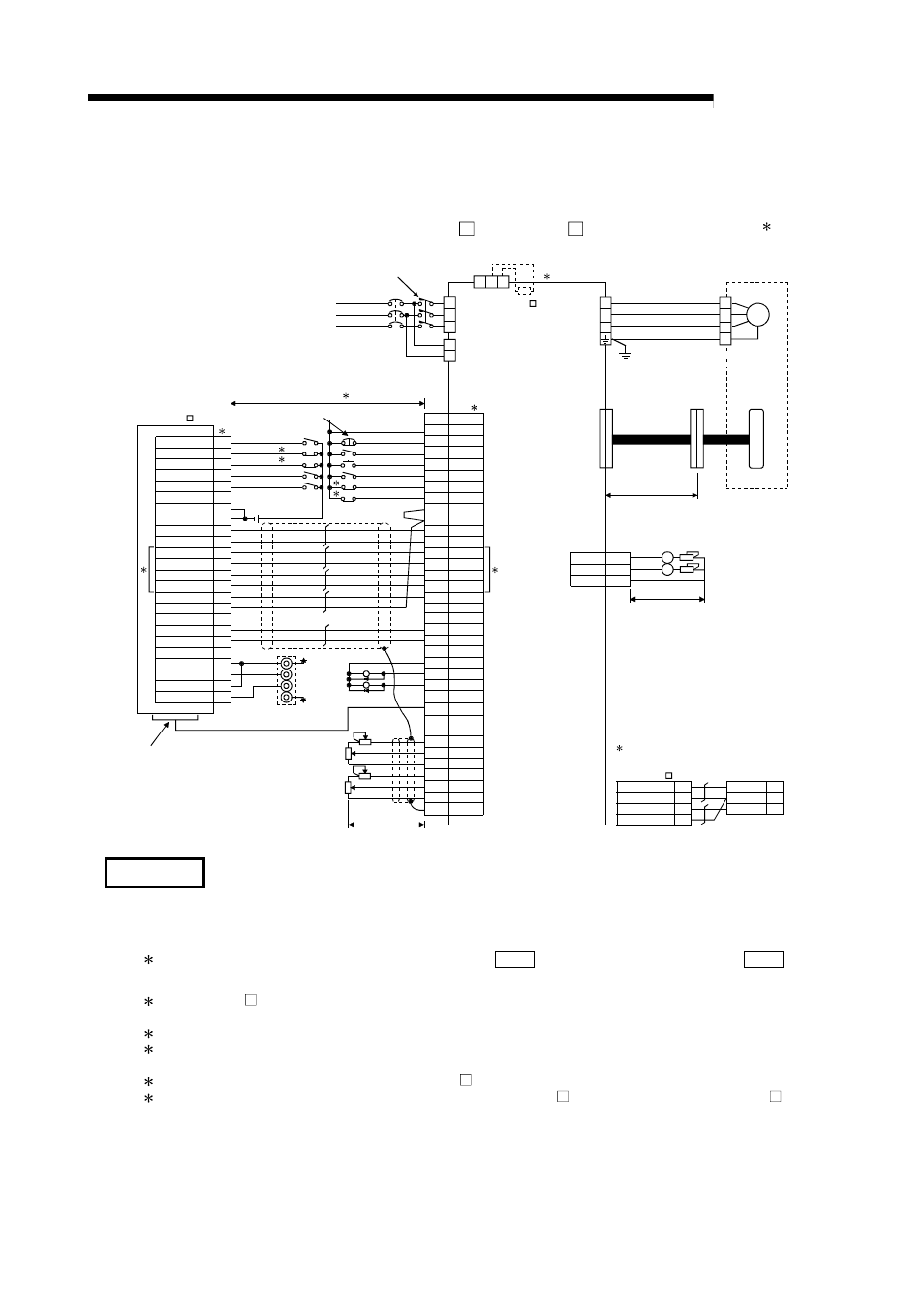
Appendix 4.1 Connection example of QD75D and MR-H A (Differential driver)
6
DOG
3
FLS
1
RLS
2
STOP
4
CHG
5
COM
6
COM
7
CLEAR
13
PULSE F+
15
16
17
18
PGO5
9
10
A19
B19
PGO COM
PULSER A+
PULSER A-
PULSER B+
PULSER B-
A20
B20
QD75D
LZ
LZR
VDD
ZSP
ALM
P15R
TLAP
LG
N15R
LG
8
9
21
23
48
1
27
28
26
30
SG
SG
SON
RES
TL
LSP
LSN
VIN
VDD
SG
PP
NPR
RD
16
40
12
15
13
38
39
20
22
17
10
36
5V
A
B
0V
+5V
Manual pulse generator
MR-HDP01
5G
RA1
RA2
Fault
Zero speed
detection
Analog torque limit command (+)
+10V/max. current
Within 2m
1
CN1
Power supply
3-phase 200VAC
Configure a sequence to turn OFF the
MC at alarms and emergency stops.
NF
MC
U
V
W
SM
Servomotor
Detector
CN2
MR-H A
CLEAR COM
14
PULSE F-
PULSE R+
PULSE R-
11
READY
12
RDY COM
CR
37
PPR
11
NP
35
49
TLAN
29
Near-point dog
Upper limit 2
Lower limit 2
Stop
External command
Servo ON
Reset
Torque limit
Forward run stroke end
Reverse run stroke end
3
3
24VDC
U
V
W
E
Within 50m
R
S
T
N C P
Regeneration option
EMG
46
4
SD
50
Analog torque limit command (-)
-10V/max. current
R1
S1
4
4
MO1
3
1
A
Max. 1mA total
Two-way deviation
Within 2m
A
10k
Monitor output
MO2
MOG
CN3
External emergency stop
Within 10m 5
LG
3
Differential driver
common terminal
15
16
PULSE F
PULSE COM
PULSE R
PULSE COM
17
18
QD75P
When connecting an open collector,
make connection as shown below.
18
47
PPO
SG
NPO
19
CN1
REMARK
(1) It is recommended to make differential driver connection since differential driver connection is more excellent than
open collector connection in max. output pulse and max. connection distance between servos. (Refer to Section
3.1 "Performance specifications".)
(2) 1: The logic for each I/O terminal can be changed with "
Pr.22
Input signal logic selection" and "
Pr.23
Output
signal logic selection" in detailed parameters 1. (Negative logic is used for all terminals in the example above.)
(3) 2: The QD75D
upper limit (FLS) and lower limit (RLS) are used in the OPR retry function. Set these signals
inside the servo amplifier limit switches.
(4) 3: These are limit switches for the servo (for stop).
(5) 4: Refer to the specification and handling instruction manual of the servo amplifier MR-H for details on
connection.
(6) 5: This indicates the distance between the QD75D
and servo amplifier.
(7) 6: Use the same logic (positive logic/negative logic) for the QD75D
and servo amplifier. The QD75D
is
initially set to negative logic.