Melsec-q, 5 data used for positioning control [table 1 – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 145
5 - 57
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
[Table 1]
Pr.1
setting value
Value set with peripheral device
(unit)
Value set with sequence program
(unit)
0 : mm
-214748364.8 to 214748364.7 (
µ
m)
-2147483648 to 2147483647 (
×
10
-1
µ
m)
1 : inch
-21474.83648 to 21474.83647 (inch)
-2147483648 to 2147483647 (
×
10
-5
inch)
2 : degree
-21474.83648 to 21474.83647 (degree)
-2147483648 to 2147483647 (
×
10
-5
degree)
3 : pulse
-2147483648 to 2147483647 (pulse)
-2147483648 to 2147483647 (pulse)
Pr.54 OPR torque limit value
Set the value to limit the servomotor torque after reaching the creep speed during
machine OPR.
Refer to Section 12.4.2 "Torque limit function" for details on the torque limits.
Pr.55 Deviation counter clear signal output time
Set the duration of the deviation counter clear signal output during a machine OPR
operation using any of the following methods: the near-point dog method, stopper
methods 1) to 3), and count method 1). (For details, refer to your drive unit
manual.)
Pr.56 Speed designation during OP shift
Set the operation speed for when a value other than "0" is set for "
Pr.53
OP shift
amount". Select the setting from "
Pr.46
OPR speed" or "
Pr.47
Creep speed".
0 : Designate "
Pr.46
OPR speed" as the setting value.
1 : Designate "
Pr.47
Creep speed" as the setting value.
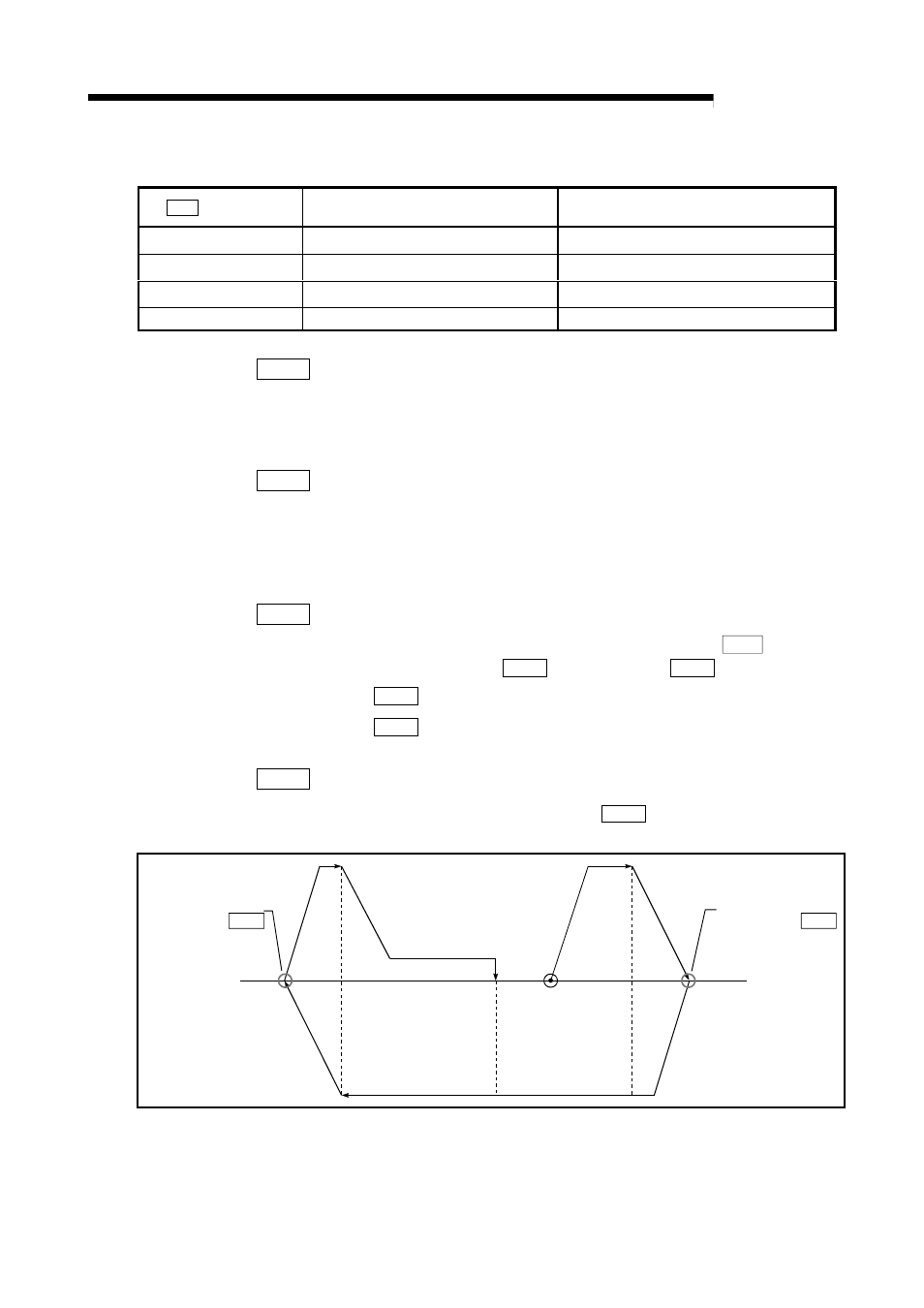
Pr.57 Dwell time during OPR retry
When OPR retry is validated (when "1" is set for
Pr.48
), set the stop time after
decelerating in 2) and 4) in the following drawing.
Start position
Temporarily stop for
the time set in Pr. 57
Temporarily stop for
the time set in Pr. 57
1)
2)
3)
4)
5)
6)