Melsec-q – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 521
12 - 45
MELSEC-Q
12 CONTROL SUB FUNCTIONS
[2] Precautions during control
(1) When "0" is set in "
Cd.10
New acceleration time value" and "
Cd.11
New
deceleration time value", the acceleration/deceleration time will not be
changed even if the speed is changed. In this case, the operation will be
controlled at the acceleration/deceleration time previously set in the
parameters.
(2) The "new acceleration/deceleration time" is valid during execution of the
positioning data for which the speed was changed. In continuous positioning
control and continuous path control, the speed is changed and control is
carried out with the previously set acceleration/deceleration time at the
changeover to the next positioning data, even if the
acceleration/deceleration time is changed to the "new
acceleration/deceleration time (
Cd.10
,
Cd.11
)".
(3) Even if the acceleration/deceleration time change is set to disable after the
"new acceleration/deceleration time" is validated, the positioning data for
which the "new acceleration/deceleration time" was validated will continue to
be controlled with that value. (The next positioning data will be controlled
with the previously set acceleration/deceleration time.)
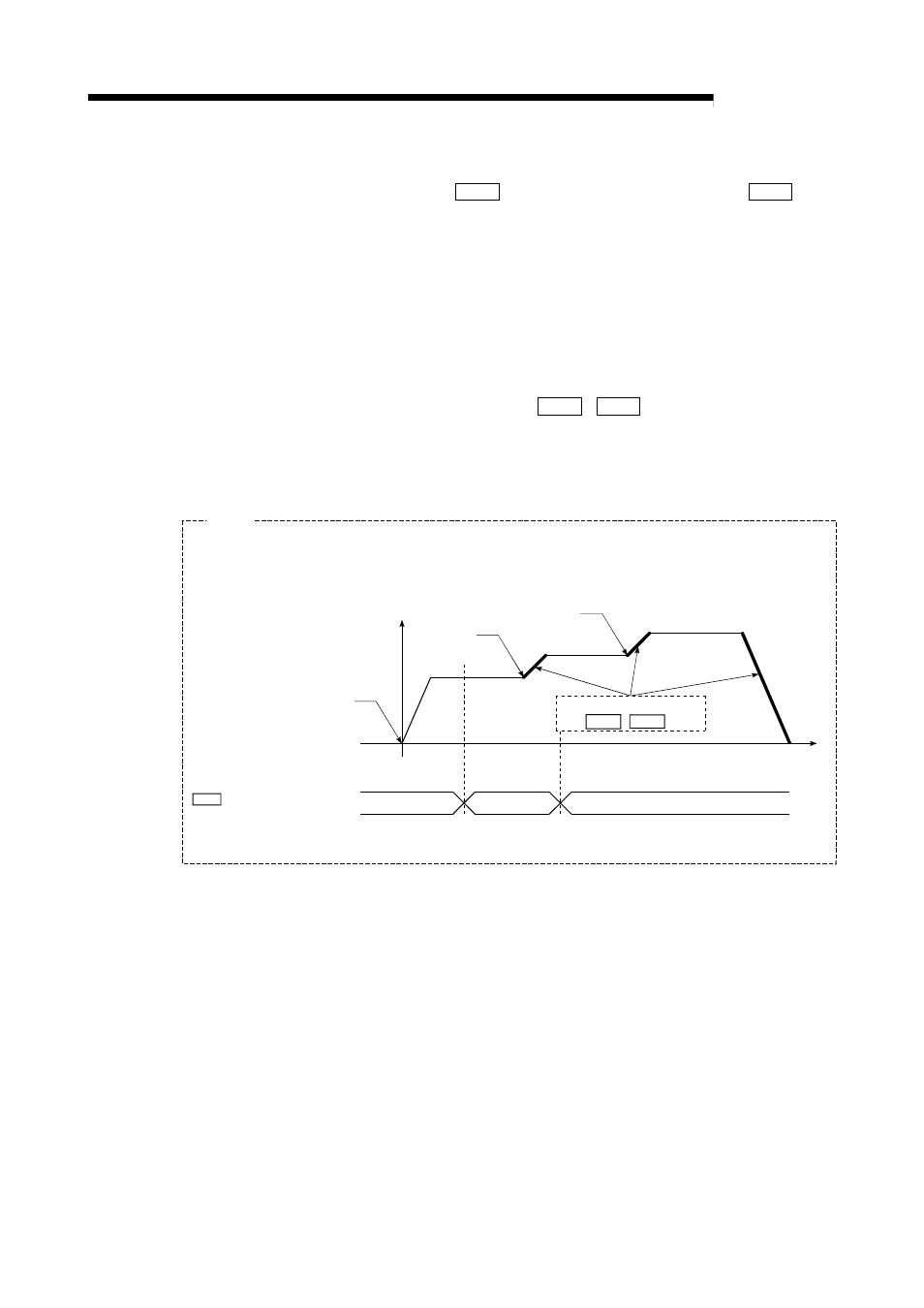
Cd.12 Acceleration/deceleration time
change during speed change,
enable/disable selection
Enabled
Speed change
New acceleration/deceleration
time ( Cd. 10 , Cd. 11 )
t
V
Disabled
Speed change
Positioning start
Disabled
Example