Melsec-q, 15 troubleshooting – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 637
15 - 33
MELSEC-Q
15 TROUBLESHOOTING
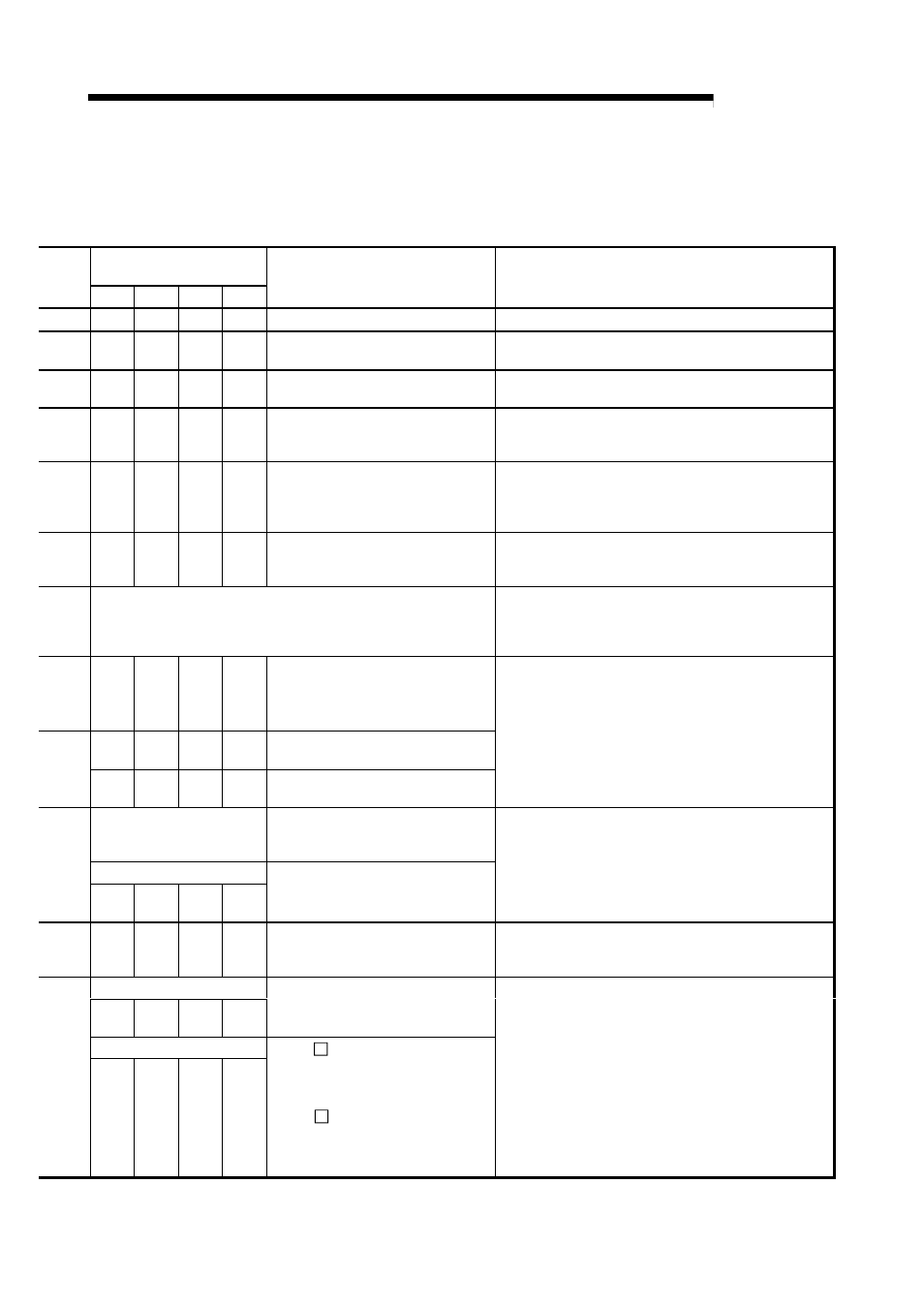
Related buffer memory
address
Axis 1 Axis 2 Axis 3 Axis 4
Set range
(Setting with sequence program)
Remedy
—
—
—
—
—
—
—
—
—
—
—
Normalize the start request ON timing.
—
—
—
—
—
Do not carry out the deviation counter clear while the
axis is running. (Refer to Chapter 8)
1503
1603
1703
1803
1: Restart
Normalize the start request ON timing.
(Do not issue the restart command when the axis
operation is not stopped.)
1548
1549
1648
1649
1748
1749
1848
1849
0, 1
1 to 600
Carry out the teaching request when the axis is not
BUSY. (Refer to Section 12.7.4)
1513
1613
1713
1813
override> 1 to 300 Prevent the overridden speed from being reduced to 0. Same as warning code 109 None (If the PLC READY signal (Y0) is turned OFF, 1513 1613 1713 1813 override> 1 to 300 1525 1625 1725 1825 1 to [Torque limit set value] 26 176 326 476 1 to 500 Set a value within the setting range. Refer to Section 5.3 "List of positioning data" for command speed 1 to 1000000 [pulse/s] 1 to 2000000000 [mm/min or another] Bias speed at start 6 156 306 456 0 to 1000000 [pulse/s] 0 to 2000000000 [mm/min or another] Re-set the command speed/bias speed at start so that 1516 1616 1716 1816 1: Speed change is requested Do not carry out the JOG speed change during New speed value 1514 1614 1714 1814 0 to 1000000 [pulse/s] 0 to 2000000000 [mm/min or another] JOG speed limit value 48 198 348 498 QD75P : 1 to 200000 [pulse/s] QD75D : 1 to 1000000 [pulse/s] Bring the set value into the setting range.
(Refer to Section 12.5.2)
respond to the teaching write request).
7
157
307
457
the command speed is equal to or larger than the bias
speed at start.
deceleration with the JOG start signal OFF.
1515
1615
1715
1815
49
199
349
499
1 to 2000000000
[mm/min or another]
1 to 2000000000
[mm/min or another]