Melsec-q, 15 troubleshooting – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 619
15 - 15
MELSEC-Q
15 TROUBLESHOOTING
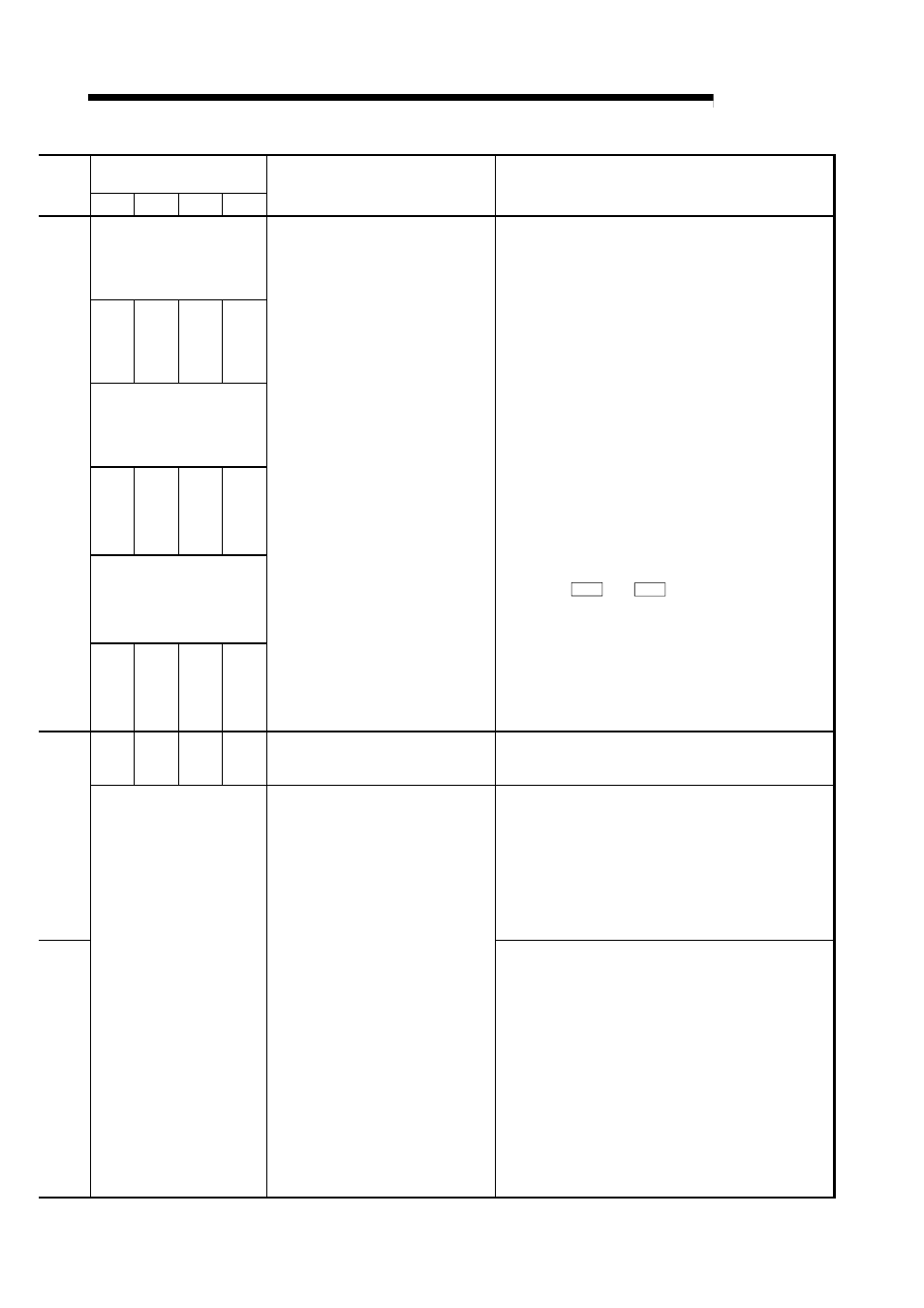
Related buffer memory
address
Axis 1 Axis 2 Axis 3 Axis 4
Set range
(Setting with sequence program)
Remedy
New current value
1506
1507
1606
1607
1706
1707
1806
1807
Software stroke limit
upper limit
18
19
168
169
318
319
468
469
Software stroke limit
lower limit
20
21
170
171
320
321
470
471
limits> • [mm] [inch] [pulse] –2147483648 to 2147483647 • [degree] 0 to 35999999 At start: Bring the current feed value into the software stroke limit using the manual control New current value: Bring the new current value into the software During operation: Correct the positioning address. Da.6 and Da.7 in Section 5.3.) 1506 1606 1706 1806 [degree] 0 to 35999999 Bring the new current value into the setting range. • Do not designate a current value changing using the positioning data following the continuous path control. • Do not designate a "current value changing" using the positioning data following the continuous path control. Refer to Section 5.3 "List of positioning data" 01 H to 1E H , 80 H to 84 H • 03 H , 0C H , 17 H , 1C H : 1 to 4 axis fixed-feed control • 04 H , 05 H , 13 H , 14 H , 18 H , 19 H , 1D H , 1E H : 1 to 4 axis speed control • 81 H : current value changing • Speed-position switching control: 06 H , 07 H • Position-speed switching control: 08 H , 09 H • 01: Continuous positioning control • 11: Continuous path control • Do not designate a speed control, fixed-feed, speed- position switching control, and position-speed • Do not carry out the fixed-feed, speed control, speed- position switching control, and position-speed • Do not carry out the speed control and position-speed switching control using the continuous path control
operation.
(Refer to Chapter 11)
Correct the positioning address (Also check
the arc address in circular interpolation with
sub points designated).
stroke limit. (Refer to Section 9.2.19)
(For the positioning and arc addresses, refer
to
1507
1607
1707
1807
(Refer to Section 9.2.19)
(Refer to Section 9.2.19)
switching control using the positioning data following
the continuous path control data.
switching control using the continuous path control
operation pattern.
operation pattern.
(Refer to Chapter 9)