Melsec-q, 12 control sub functions – MITSUBISHI ELECTRIC Mitsubishi Programmable Logic Controller QD75D User Manual
Page 512
12 - 36
MELSEC-Q
12 CONTROL SUB FUNCTIONS
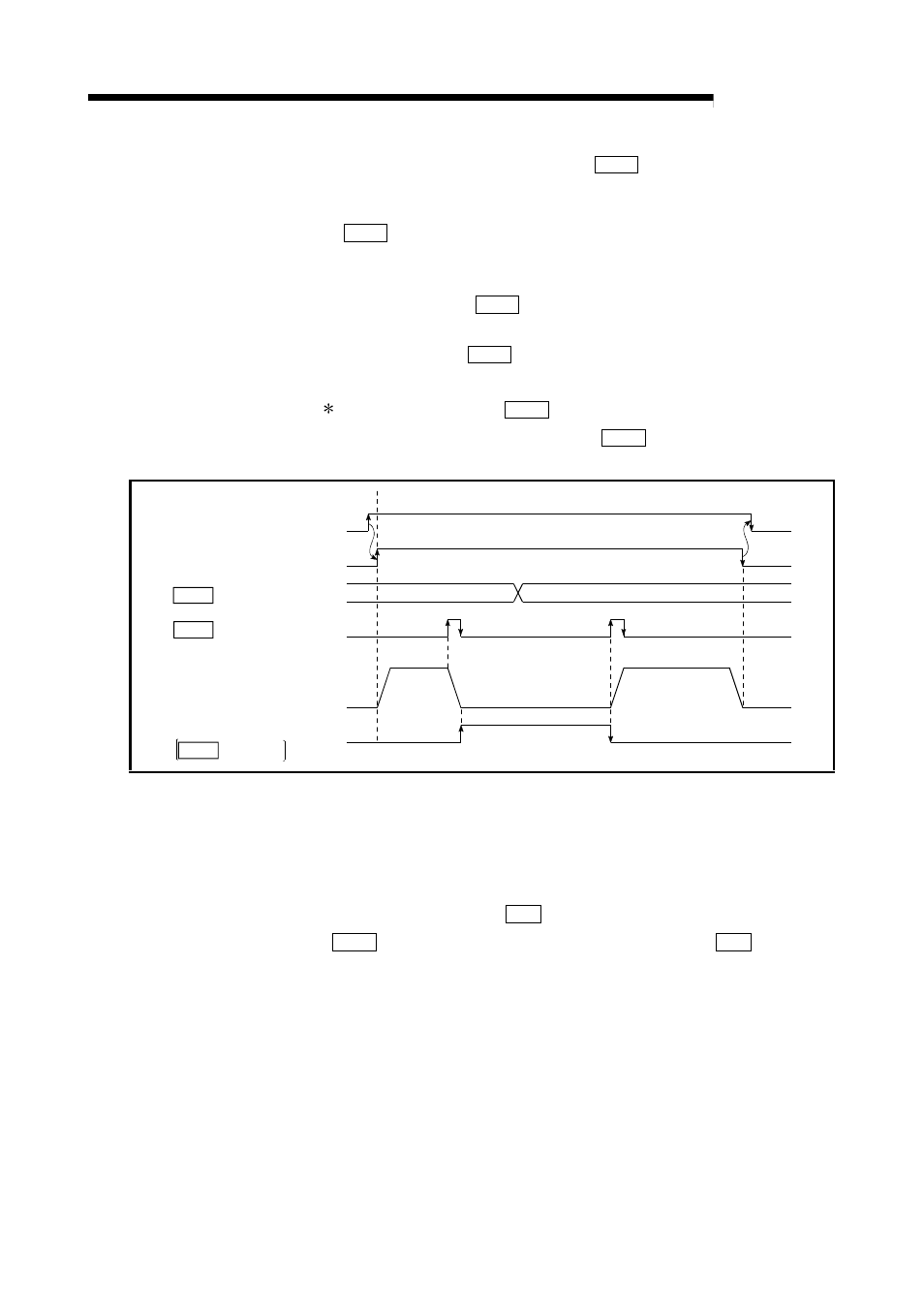
(4) When the speed is changed by setting "
Cd.14
New speed value" to "0",
the operation is carried out as follows.
•
A deceleration stop is carried out, and the speed change 0 flag
(
Md.31
Status: b10) turns ON.
(During interpolation control, the speed change 0 flag on the reference axis
side turns ON.)
•
The axis stops, but "
Md.26
Axis operation status" does not change, and
the BUSY signal remains ON. (If a stop signal is input, the BUSY signal
will turn OFF, and "
Md.26
Axis operation status" will change to
"stopped".)
In this case, setting the "
Cd.14
New speed value" to a value besides "0"
will turn OFF the speed change 0 flag (
Md.31
Status: b10), and enable
continued operation.
Md. 31 status: b10
Positioning start signal
BUSY signal
Cd. 14 New speed value
Cd. 15 Speed change request
Positioning operation
1000
0
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Speed change 0 flag
[Y10, Y11, Y12, Y13]
[XC,XD,XE,XF]
Fig. 12.25 Speed change at new speed value "0"
(5) A warning "Deceleration/stop speed change (warning code: 500)" occurs
and the speed cannot be changed in the following cases.
•
During deceleration by a stop command
•
During automatic deceleration during positioning control
(6) A warning "Speed limit value over (warning code: 501)" occurs and the
speed is controlled at the " Pr.8 Speed limit value" when the value set in
"
Cd.14
New speed value" is equal to or larger than the " Pr.8 Speed limit
value".
(7) When the speed is changed during interpolation control, the required speed
is set in the reference axis.
(8) When carrying out consecutive speed changes, be sure there is an interval
between the speed changes of 100ms or more.
(If the interval between speed changes is short, the QD75 will not be able to
track, and it may become impossible to carry out commands correctly.)
(9) When a speed change is requested simultaneously for multiple axes,
change the speed in the ascending axis number order.
(10) Speed change cannot be carried out during the machine OPR. A request
for speed change is ignored.
(11) When deceleration is started by the speed change function, the deceleration
start flag does not turn ON.