2 swing - properties – Metrohm tiamo 2.2 (ProcessLab) User Manual
Page 1137
■■■■■■■■■■■■■■■■■■■■■■
5 Method
tiamo 2.2 (ProcessLab)
■■■■■■■■
1121
Parameters
The parameters for the command SWING are configured in the following
dialog window:
■
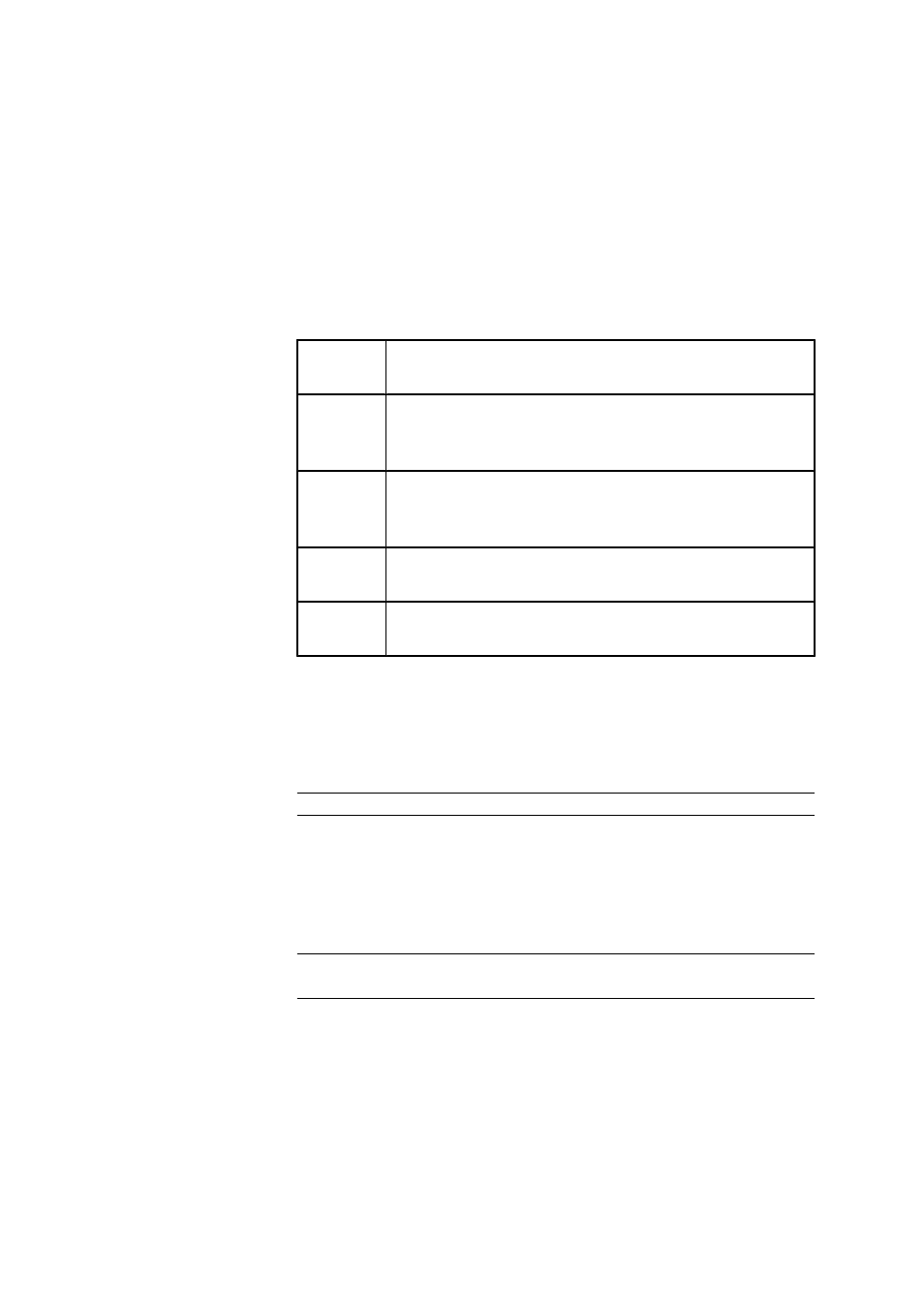
Command variables
The following command variables are generated in the method run by the
command SWING and can be used in formulas under the designation
'Command name.Variable designation':
Identifi-
cation
Description
.BSY
Command status; 1 = BUSY, HOLD or ERROR; 0 =
READY; invalid (variable not available) = Command has not
ever been started
.FIN
Command status; 1 = Command has been ended at
least once, 0, invalid (variable not available) = Command
has never been ended
.SAN
Current, absolute swing angle of the robotic arm in ° (entry
upon ending the command)
.SPO
Current external position (entry when ending the com-
mand); 0 means invalid position
5.6.7.3.2
SWING - Properties
Dialog window: Method
▶ SWING ▶ Properties... ▶ SWING - 'Command name'
Command name
Name of the command.
Input
25 characters
Device
Device name
Selection of a device from those available in the device table. The only devi-
ces which shall be offered are those with which the command can run.
Selection
'Device name' | not defined
Default value
not defined
not defined
In this case, the device name must be assigned by the user at the start of
the method.