Spectra Precision FAST Survey Reference Manual User Manual
Page 87
p85
GPS Base for All RTK GPS Brands
For all brands of GPS, the GPS Base button is the command that configures the base receiver for broadcasting GPS
corrections to the rover. You must click the GPS Base button in while you are connected to the base receiver. The base
needs a set of coordinates to use as its stationary position. Given that you are configured for a particular coordinate
system, there are 2 main “types” of localizations: (1) Enter an Accurate Base Position and work from that point outward
on the scale and “true north” of that system (no rover localization), (2) Enter an Accurate or Semi-Accurate (Read from
GPS) Base Position and then localize to known rover points that transform to the local coordinate system (required if the
local system is not true GPS north). There is also a “mixed” base-rover approach. To use the base in the localization,
you should configure the base with the "Use Local Coordinates" option under "From Known Position". Here, you
configure the base by entering the local point (5000, 5000,100) and start a new localization file (or use an existing one if
it applies). Then, at your rover, you can add more points to the localization as necessary. In this case, a single rover
point within Localization will produce a scale factor and best fit to the local coordinates.
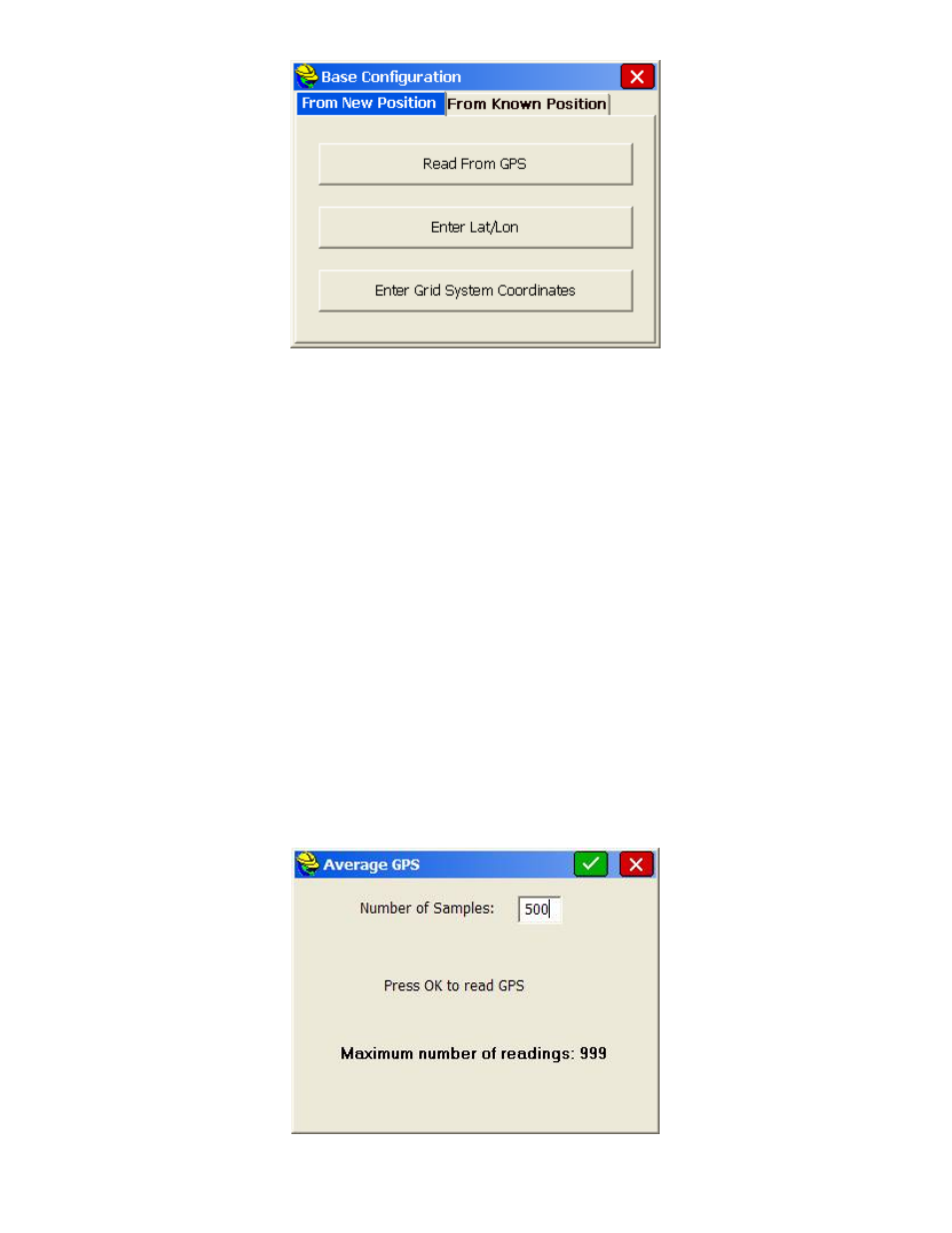
There are six methods to set the stationary base position, organized into 2 categories: From New Position includes Read
from GPS, Enter Lat/Long and Enter Grid System Coordinates. The From Known Position tab includes Previously
Surveyed Point, Use Local Coordinates and Read From File. When you are starting a new job (no information in the
raw RW5 file yet), always use the options in From New Position.
From New Position Options
Read from GPS
- This method takes a specified number of GPS readings from the base receiver’s autonomous
position and uses it as its “true” position. The autonomous position can be off of the actual position by 150 feet.
The base will calculate corrections based on this autonomous position. If you set up the base with this method, the
rover points must be used for localization since the corrections they are using are based on the approximate position
of the base antenna. Read GPS, combined with rover-based localization, is one of the most common methods used
to start a GPS survey. When Read from GPS is used, the program will present the current position, as shown: