Chapter 19 controller area network ( mscan ), 1 overview, Mscan – Freescale Semiconductor MPC5200B User Manual
Page 640
Overview
MPC5200B Users Guide, Rev. 1
Freescale Semiconductor
19-1
Chapter 19
Controller Area Network ( MSCAN )
19.1
Overview
The following sections are contained in this document:
•
•
•
Section 19.3, External Signals
•
•
Section 19.5, Memory Map / Register Definition
•
Section 19.6, Programmer’s Model of Message Storage
•
Section 19.7, Functional Description
The MPC5200B contains 2 identical and independent MSCAN Controller :
•
MSCAN1 = MBAR + 0x0900
•
MSCAN2 = MBAR + 0x0980
The Motorola Scalable Controller Area Network (MSCAN) definition is based on the MSCAN12 definition which is the specific
implementation of the Motorola Scalable CAN concept targeted for the Freescale Semiconductor, Inc. (formerly Motorola) MC68HC12
Microcontroller Family.
The module is a communication controller implementing the CAN 2.0 A/B protocol as defined in the BOSCH specification dated September
1991. For users to fully understand the MSCAN specification, it is recommended that the Bosch specification be read first to familiarize the
reader with the terms and concepts contained within this document.
The CAN protocol was primarily, but not only, designed to be used as a vehicle serial data bus, meeting the specific requirements of this field:
real-time processing, reliable operation in the EMI environment of a vehicle, cost-effectiveness and required bandwidth.
MSCAN utilizes an advanced buffer arrangement resulting in a predictable real-time behavior and simplifies the application software.
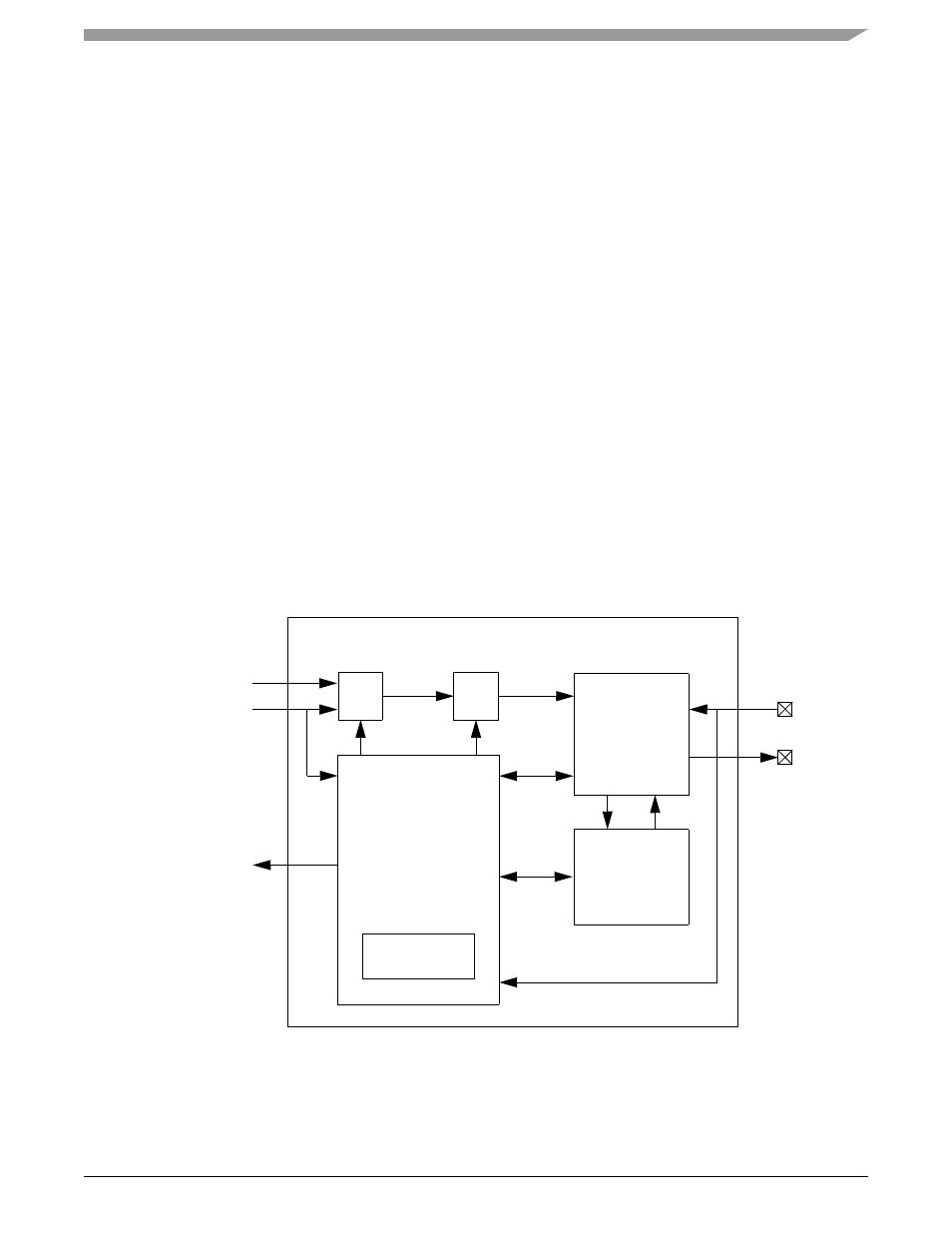
Figure 19-1. MSCAN Block Diagram
RXCAN
TXCAN
Receive/
Transmit
Engine
Message
Filtering
and
Buffering
Control
and
Status
Interrupt Req.
CANCLK
IP bus clock (PLL)
Configuration
Oscillator Clock
MUX
Presc.
Tq Clk
MSCAN
Wake-Up
Registers