About dual compensation control mode – MTS Series 793 User Manual
Page 87
About Dual Compensation Control Mode
Note:
Dual compensation is also known as “mixed-mode” compensation.
The dual compensation control mode is typically used to provide programming and control on a channel
whose sensor feedback is unsuitable for maintaining closed-loop control.
This control mode requires two feedback signals:
•
Control feedback (typically displacement), which is a relatively stable signal that is used by the PIDF
controller to maintain closed-loop control. Control feedback is provided when you select a Base Control
Mode.
Control feedback may be unsuitable if it is too noisy (for example, force feedback), or if it possesses only
dynamic characteristics (for example, accelerometer feedback).
•
Compensator feedback (typically acceleration), which is used for command compensation, is the dimension
you actually program in. Compensator feedback is provided when you select a resource for the dual
compensation control mode (Active fdbk).
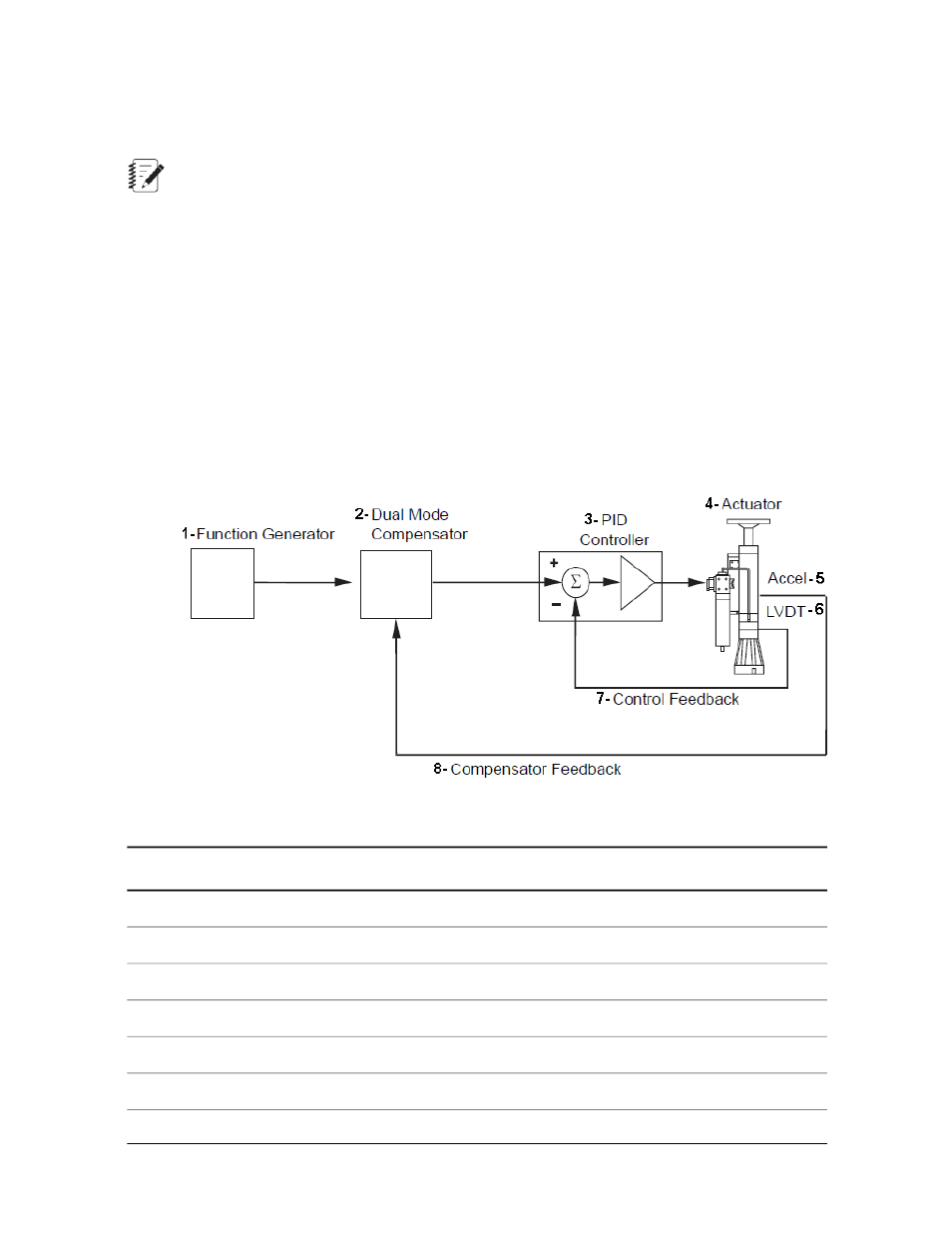
Dual Compensation Control Mode
Description
Callout
Function Generator
1
Dual Mode Compensator
2
PID Controller
3
Actuator
4
Accel
5
LVDT
6
Control Feedback
7
MTS Series 793 Control Software 87
Station Builder