5 rack drive, 1 calculations, Rack drive – Lenze DSD User Manual
Page 94: Calculations, 7applications
7
Applications
7.5
Rack drive
94
Lenze · Drive Solution Designer · Manual · DMS 4.2 EN · 12/2013 · TD23
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
7.5
Rack drive
The vast majority of positioning systems require linear movements. If a rotating drive is used, the
rotation of the motor has to be converted into a linear movement. The speeds that can be achieved,
and therefore the dynamics of the positioning process and the repeat accuracy, and thus the quality
of the positioning process to a great extent are defined by the mechanics.
Characteristics of a rack drive
• A motor actuates a pinion which in turn actuates a rack and pinion, or the motor actuates itself
on a stationary rack and pinion.
• Rack and pinions provide an unlimited traverse path, however they are not very accurate and
have a tendency for slip.
7.5.1
Calculations
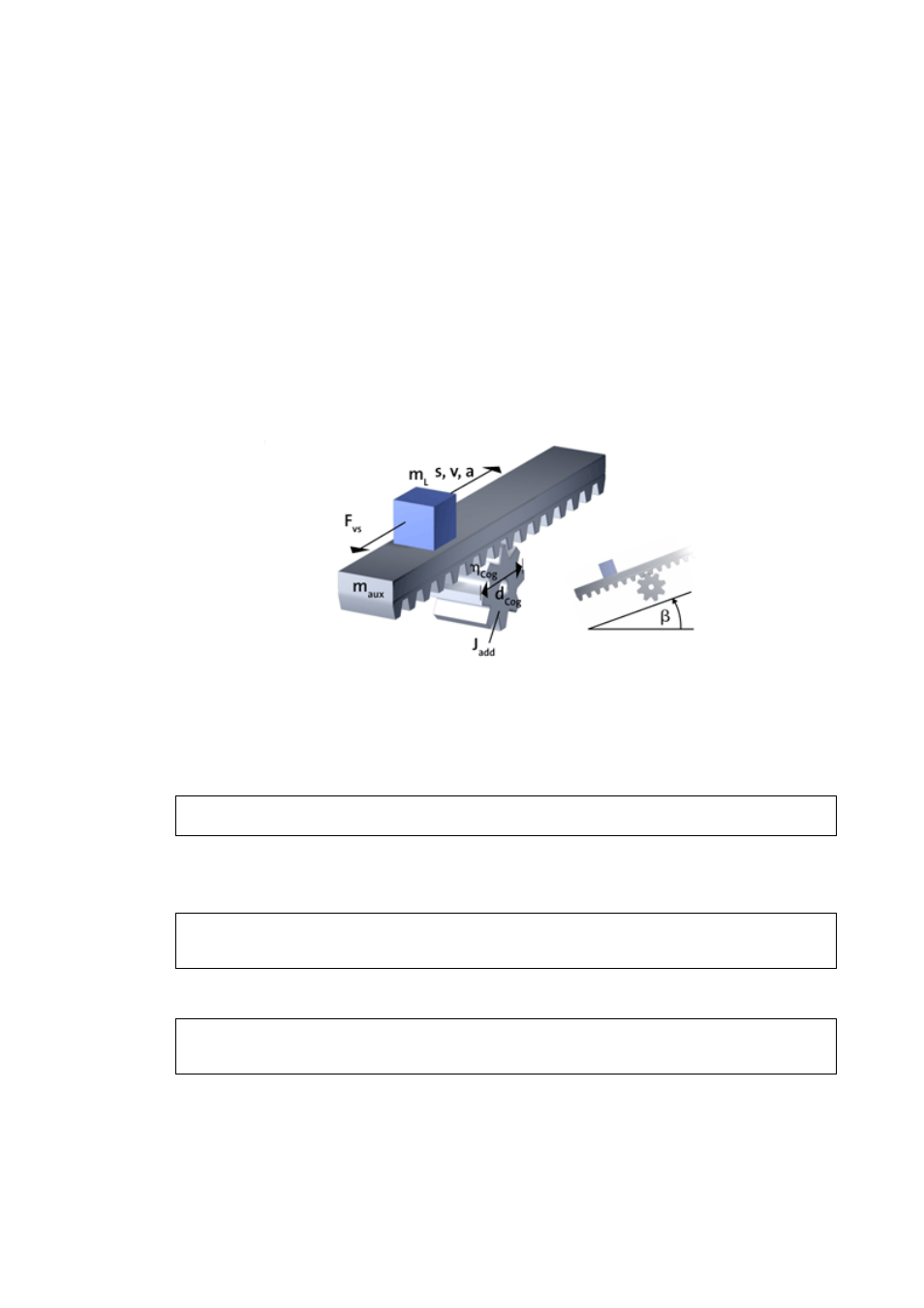
For a rack drive according to the drawing the following applies:
The pinion diameter can be calculated from the module and the number of teeth:
[7-41] Equation 1: Pinion diameter
Conversion of translatory variables into rotary variables
[7-42] Equation 2: Angle
[7-43] Equation 3: Angular velocity
d
Cog
N
Cog
M
Cog
⋅
=
ϕ
2000 s
⋅
d
Cog
--------------------
2000 s
⋅
N
Cog
M
Cog
⋅
------------------------------
=
=
ω
2000 v
⋅
d
Cog
--------------------
2000 v
⋅
N
Cog
M
Cog
⋅
------------------------------
=
=