4 traction-controlled winding drive, 7applications – Lenze DSD User Manual
Page 210
7
Applications
7.22
Winding drive for rewinder/unwinder
210
Lenze · Drive Solution Designer · Manual · DMS 4.2 EN · 12/2013 · TD23
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
7.22.4
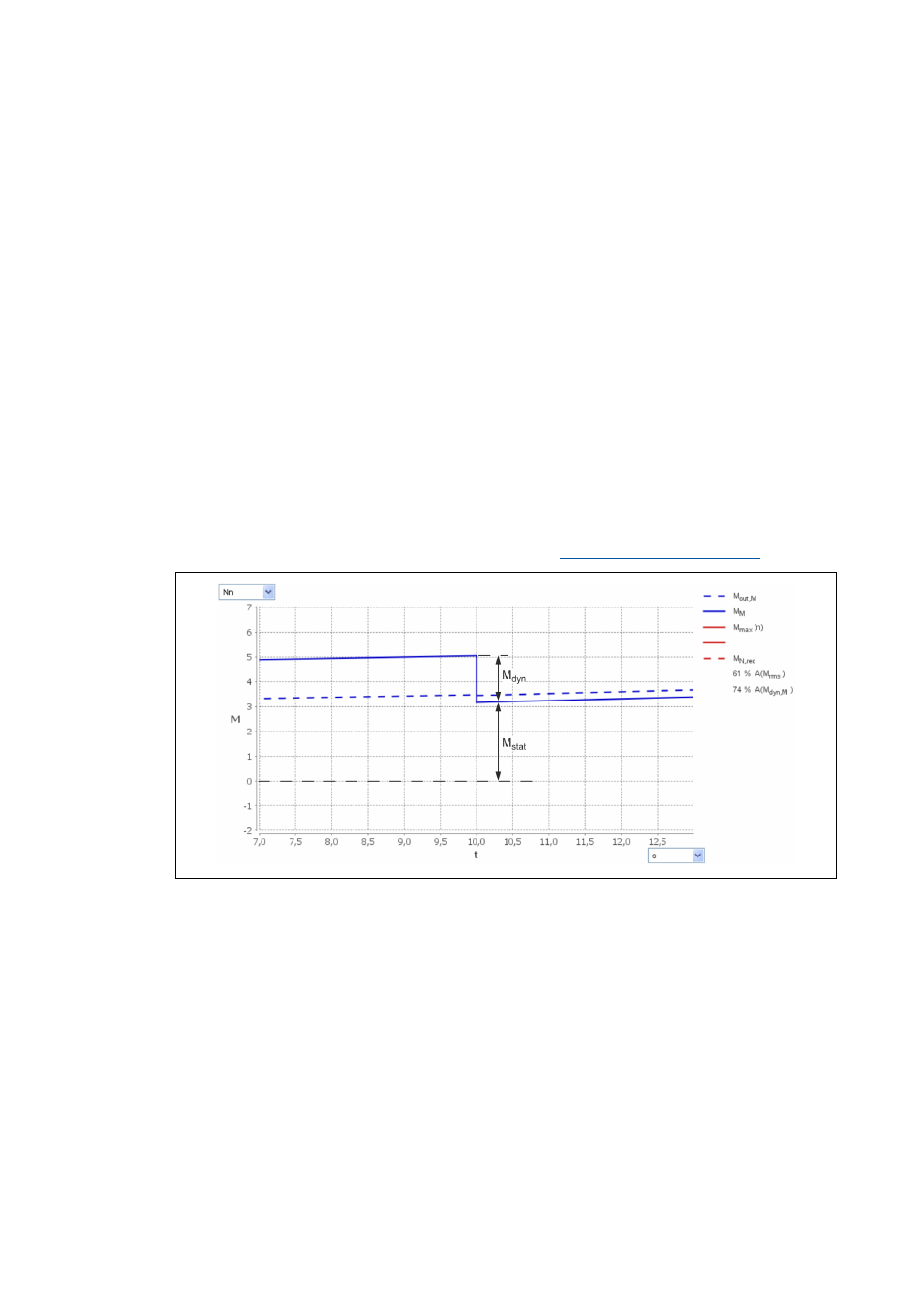
Traction-controlled winding drive
In winding drives, the tensile force is generated by the static torque M
stat
. During the acceleration
and deceleration phases, the drive requires an additional dynamic torque M
dyn
.
In order to prevent the tensile force from exceeding the limit values and in order to avoid empty
reels, the dynamic component of the torque should be smaller than the static component for trac-
tion-controlled winders. If the disturbance compensation works well and is repeatable, the dynamic
component may be a little greater than the static component. Critical phases are accelerations dur-
ing the start of winding to an empty reel with minimum tensile force.
• Guide value: M
dyn
< 1 ... 3 × M
stat
Tip!
How to limit the dynamic torque:
• Select moderate acceleration and deceleration times
• Create an S-shaped motion profile
The M
dyn
/M
stat
ratio can be read from the torque-time characteristic of the motor. Dimension the
drive completely and zoom in on the start of the characteristic (starting time) to be able to see the
dynamic torque. Use the Zoom function for this purpose.
[7-233] Torque-time characteristic of the motor