5 permissible torque, 6 constant torque loss, 11 drive dimensioning – Lenze DSD User Manual
Page 345
Lenze · Drive Solution Designer · Manual · DMS 4.2 EN · 12/2013 · TD23
345
11
Drive Dimensioning
11.5
Selection of an additional drive element
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
11.5.5
Permissible torque
11.5.6
Constant torque loss
For applications actuated via belts or chain, torque-dependent, speed-dependent, and constant
losses occur:
• In comparison to the other losses, the speed-dependent losses are small and are thus are com-
bined with the constant losses.
• Partly there is a high pretension which causes great bearing forces and friction losses between
the belt or chain and the pinion.
• These losses in the DSD are combined as constant, load-independent losses.
• The proportion of these losses with regard to the total losses is entered under M
th,K
.
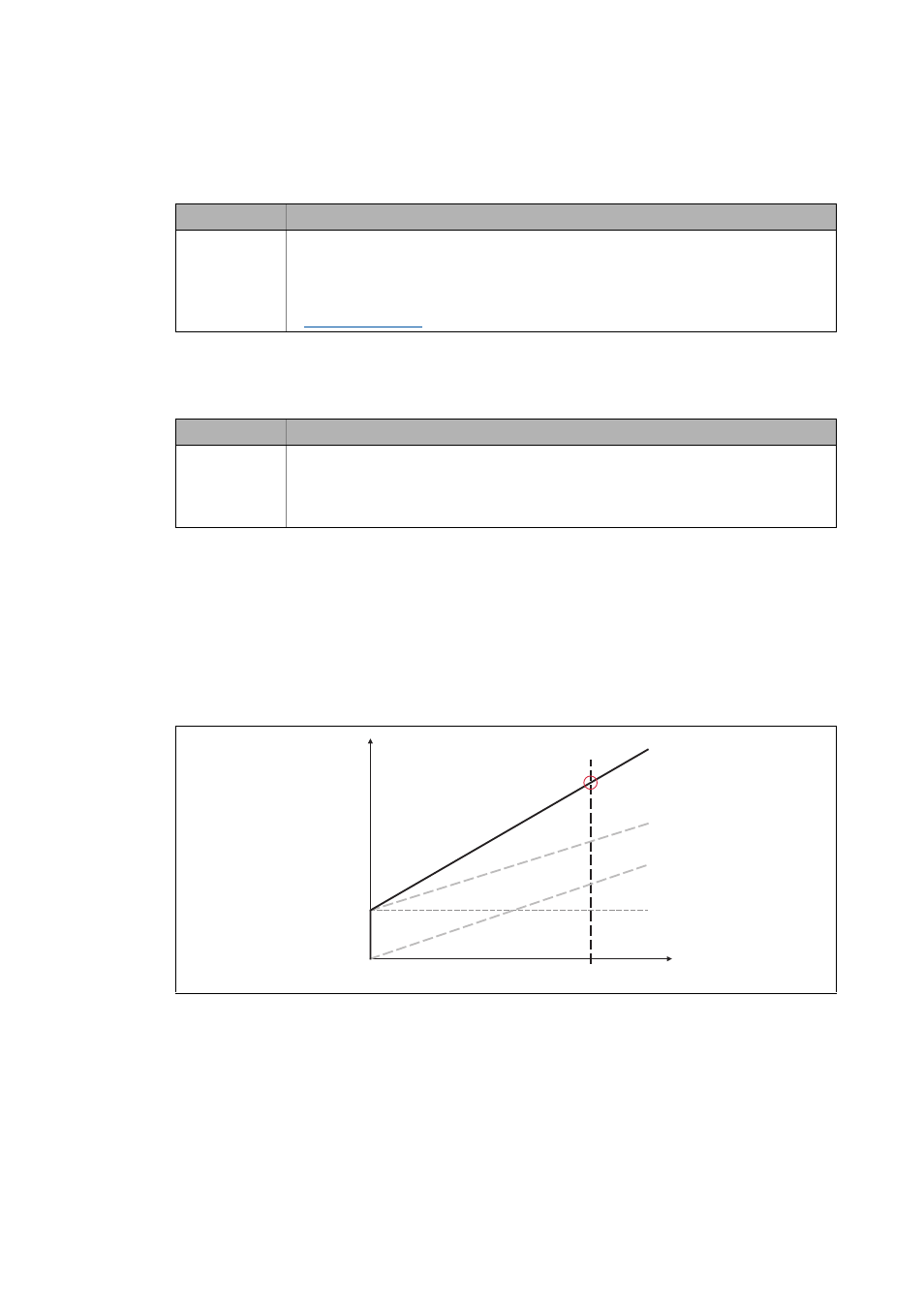
[11-16] Definition of the constant, load-independent losses (M
th,K
)
Symbol
Description
M
per,out,K
Permissible torque at the output end of the additional drive element
• This torque is used for the determination of the maximum constant loss from the efficiency.
• Due to the high pretension, belt drives have constant friction losses.
• The friction torque depends on the parameters of the belt (e. g. width, material, tensile mem-
ber used). These parameters also affect the permissible torque to be transmitted.
Symbol
Description
M
th,K
Constant torque portion resulting from the losses of the prestressed belt.
• Relative to the output end.
• The following applies:
M
th,K
1 η
K
–
(
) M
per,K
⋅
≤
M
in
M
th,K
M
out
M
per,K