9 motion profile shape, 10 jerk ratio, 11 downtime 1 – Lenze DSD User Manual
Page 221: 7applications
Lenze · Drive Solution Designer · Manual · DMS 4.2 EN · 12/2013 · TD23
221
7
Applications
7.22
Winding drive for rewinder/unwinder
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
7.22.7.9
Motion profile shape
7.22.7.10 Jerk ratio
7.22.7.11 Downtime 1
Parameter
Description
• S-rounding
• For an S-shaped motion profile, the acceleration is linearly shown and hidden. This acts as
jerk limitation. Recommended for winding drives.
• linear
• Linear motion profiles have no jerk limitation. The maximum values of torque and speed
are reached simultaneously.
Traction-controlled winding drive ( 210)
Parameter
Description
Jerk ratio for the acceleration time and deceleration time.
• An S-shaped acceleration/deceleration consists of three sections:
• Showing the acceleration/deceleration
• Linear acceleration/deceleration
• Hiding the acceleration/deceleration
• The value defines the share of the two sections 'Showing' and 'Hiding'.
Parameter
Description
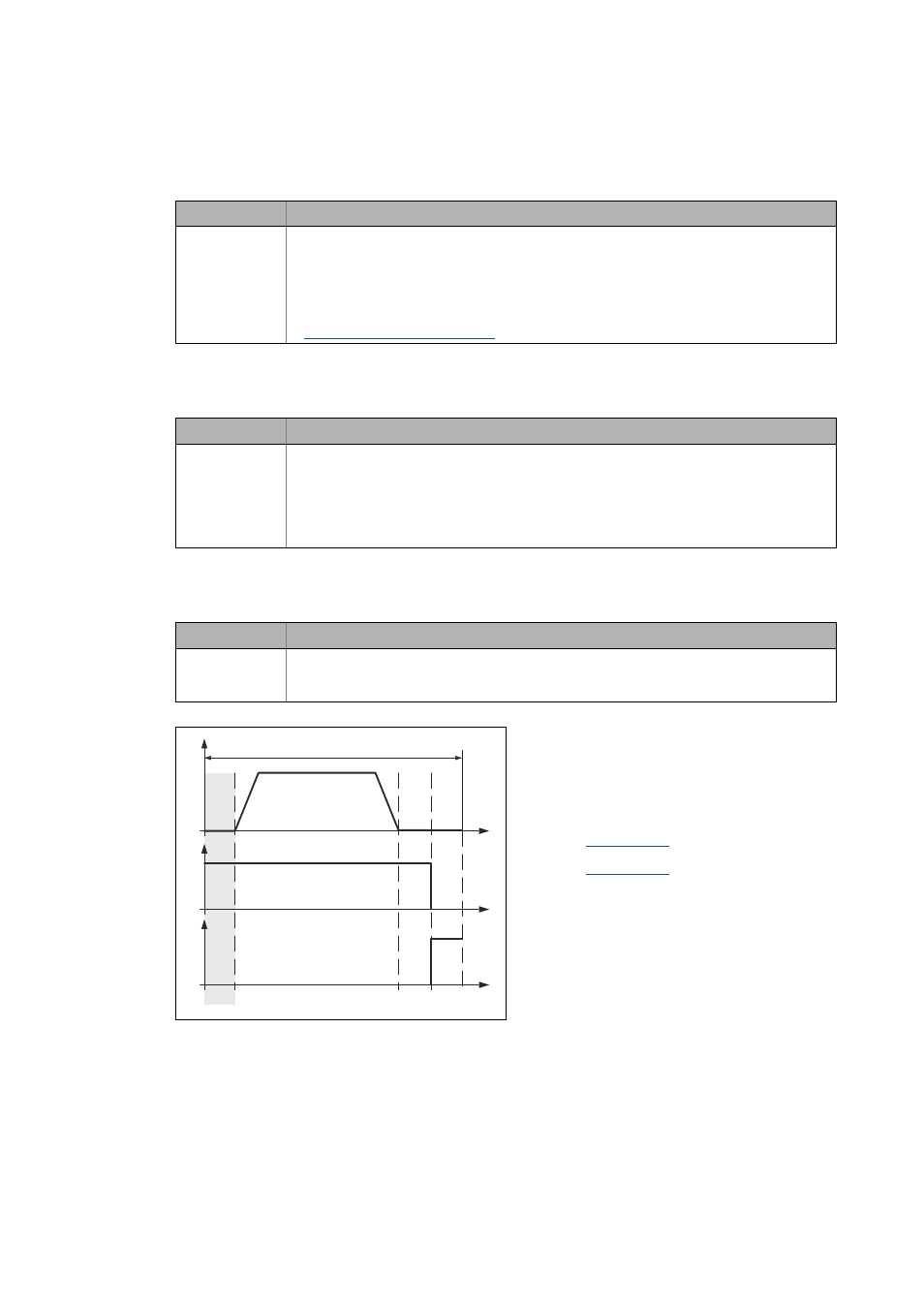
t
0.1
Downtime before the acceleration phase while the max. tensile force F
max
already acts on the
winding material.
• Condition: CINH = 0
CINH
Controller locked
F
Tensile force of the winding drive
T
Cycle of one winding process
t
0.1
Downtime 1
t
0.2
t
0.3
v
Line speed
T
v
t
t
0,1
t
0,2
t
0,3
F
t
1
t
CINH