10 structure of the drive axis – Lenze DSD User Manual
Page 305
10
Structure of the drive axis
10
.3
Dri
ve con
ce
pt
Lenze ·
Dri
ve
Soluti
on
Desi
gner ·
M
anual
· DM
S
4.
2
EN
·
12/2013 ·
TD23
30
5
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_ _
_
10.3.7
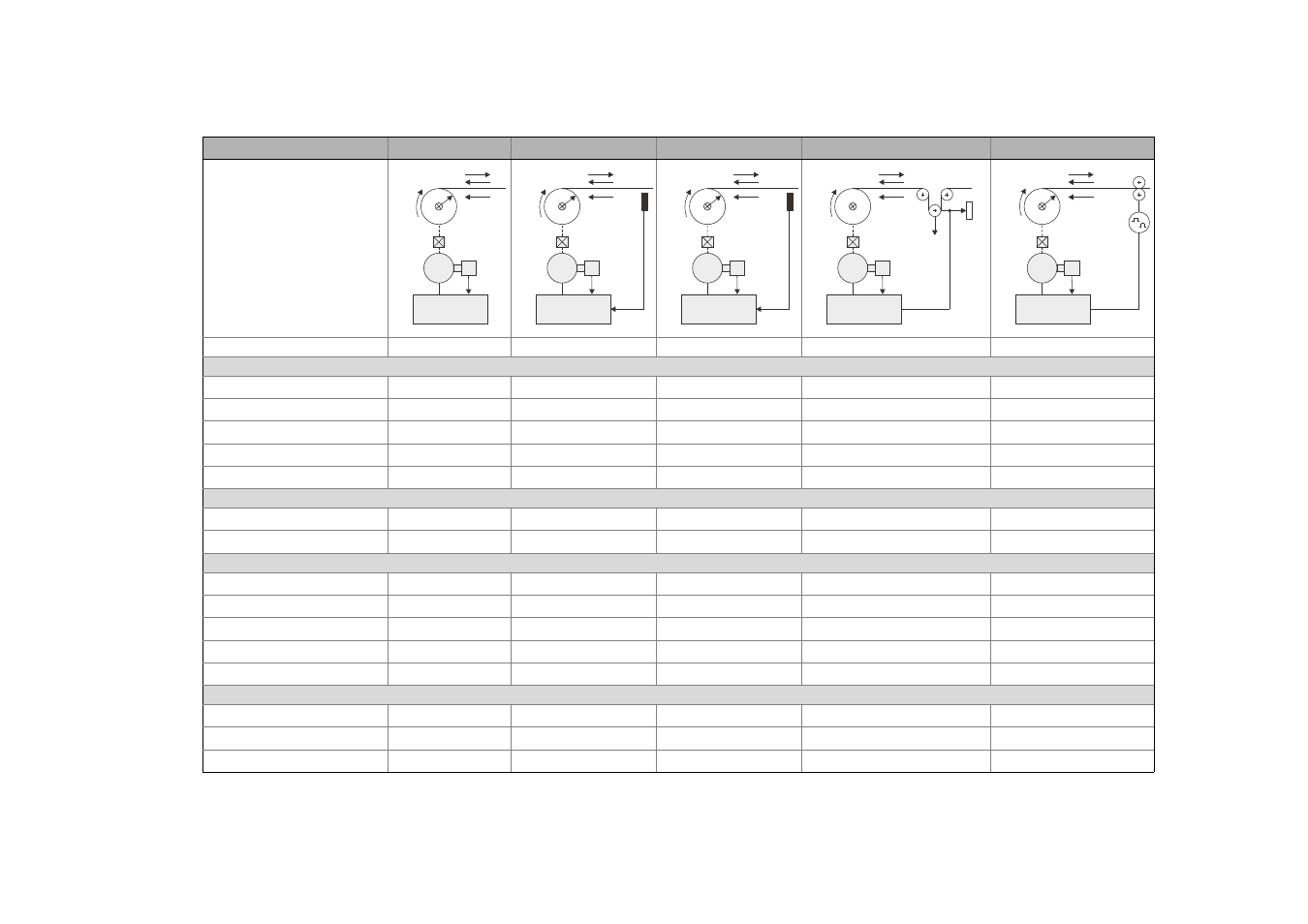
Selection help: Products for winding drive systems
Tension control (M)
Tension control (M)
1)
Tension control (n)
1)
Dancer position control (n)
Velocity control (n)
Winder control mode
Traversing motor control
Open-loop torque control
Closed-loop torque control
Closed-loop speed control
Closed-loop speed control
Open-loop speed control
Axial gearboxes, ratios
Helical gearbox GST
+
+
+
++
++
Shaft-mounted helical gearbox GFL
+
+
+
++
++
MPR planetary gearbox
+
+
+
++
++
Toothed belt
++
++
++
++
++
Direct drive
++
++
++
++
++
Right-angle gearbox
Bevel gearbox GKR
+
+
+
++
++
GKS helical-bevel gearbox
+
+
+
++
++
Servo motors
MCA
++
++
++
++
++
MCS
+
+
+
+
+
MDXKS
+
+
+
+
+
MQA
++
++
++
++
++
SDSGA
++
++
++
++
++
Three-phase AC motors
MDXMA
+
+
+
+
+
MFxMA
0
0
0
0
0
MHxMA
++
++
++
++
++
v
F
M
3~
Inverter
n, M
r
v
F
n, M
r
M
3~
Inverter
M = f(F, r)
n = f(v, r)
F
act
v
F
n, M
r
M
3~
Inverter
M = f(F, r)
n = f(v, r)
F
act
v
F
F~F
G
F
G
M
3~
n, M
Inverter
Actual
position
v
F
M
3~
n, M
r
v
act
Inverter
M = f(F, r)
n = f(v, r)