3 calculations, Calculations, 7applications – Lenze DSD User Manual
Page 76
7
Applications
7.3
Belt drive, rotating
76
Lenze · Drive Solution Designer · Manual · DMS 4.2 EN · 12/2013 · TD23
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
7.3.3
Calculations
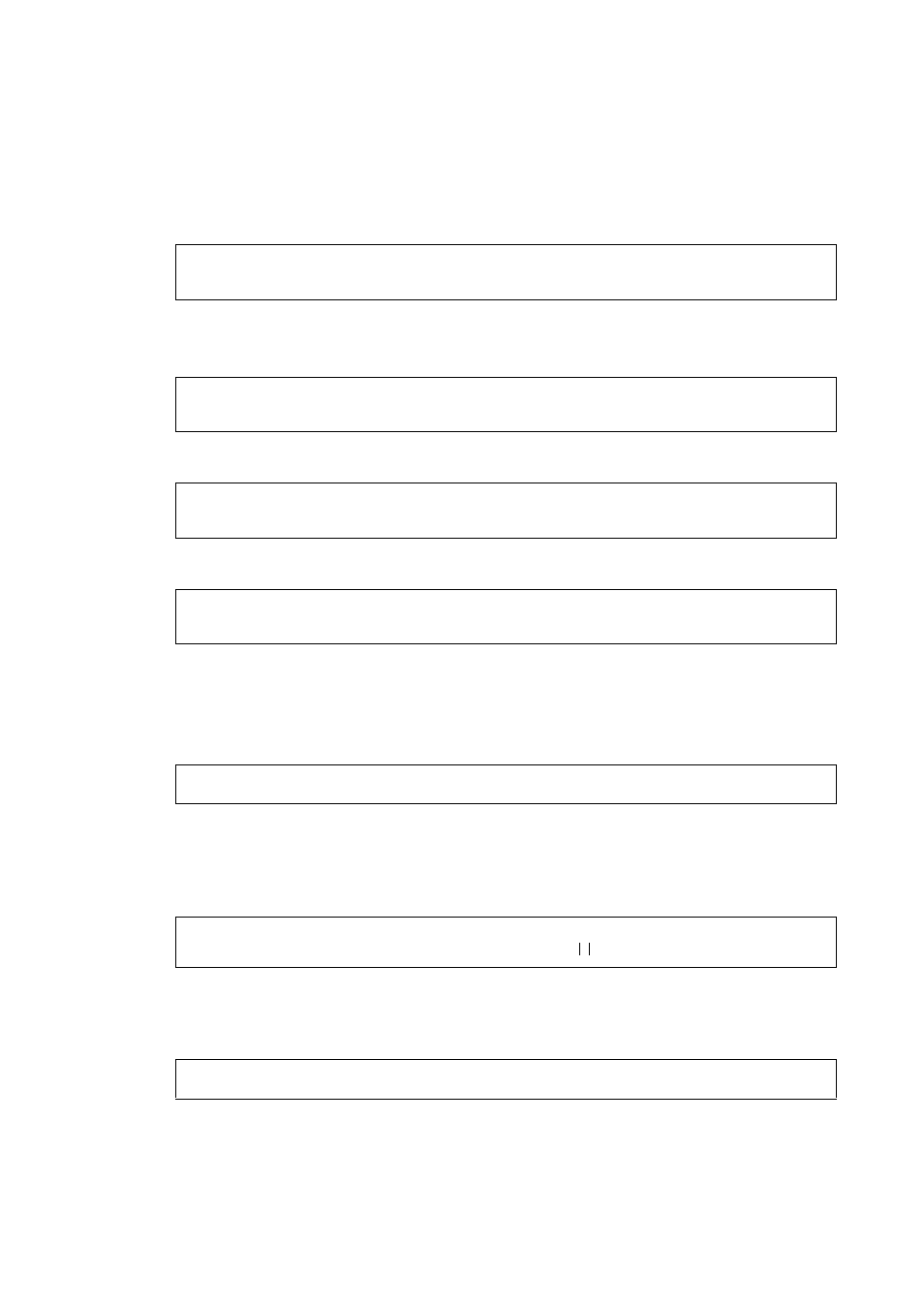
For a linear axis with rotating toothed belts according to the drawing, the following applies:
The belt pulley has the following effective diameter, where p
Cog
specifies the belt pitch:
[7-10] Equation 1: Diameter of belt pulley
Conversion of translatory variables into rotary variables
[7-11] Equation 2: Angle
[7-12] Equation 3: Angular velocity
[7-13] Equation 4: Angular acceleration
Forces of the linear motion
First the mass which is to be moved linearly has to be calculated. The payload m
L
can adopt different
values during the travel cycle. The mass of carriage m
aux
is considered separately.
[7-14] Equation 5: Total mass
The friction force F
μ
can for instance occur on the guide rails of the slide. The force acts opposite to
the direction of movement and is taken into consideration by the fraction v/|v| in the following
equation, where at v = 0 the force F
μis
0. The static friction at standstill is not considered.
[7-15] Equation 6: Friction force
If the friction force F
μ
is related to the mass in motion, a specific travelling resistance results, which
contains all parts depending on the mass:
[7-16] Equation 7: Specific travelling resistance of the application
For vehicles with a wheel guide instead of a linear guide, here the travelling resistance F’ is to be
used:
d
Cog
[mm]
p
Cog
[mm] N
Cog
⋅
π
-------------------------------------------
=
ϕ
2000 s
⋅
d
Cog
--------------------
2000 π s
⋅ ⋅
p
Cog
N
Cog
⋅
----------------------------
=
=
ω
2000 v
⋅
d
Cog
--------------------
2000 π v
⋅ ⋅
p
Cog
N
Cog
⋅
----------------------------
=
=
α
2000 a
⋅
d
Cog
--------------------
2000 π a
⋅ ⋅
p
Cog
N
Cog
⋅
----------------------------
=
=
m
sum
m
L
m
aux
+
=
F
μ
m
sum
g μ
Gdn
β
cos
v
v
-----
⋅ ⋅
⋅
⋅
=
F’
g μ
Gdn
β
cos
⋅
⋅
=