1 calculations, 7applications – Lenze DSD User Manual
Page 157
Lenze · Drive Solution Designer · Manual · DMS 4.2 EN · 12/2013 · TD23
157
7
Applications
7.14
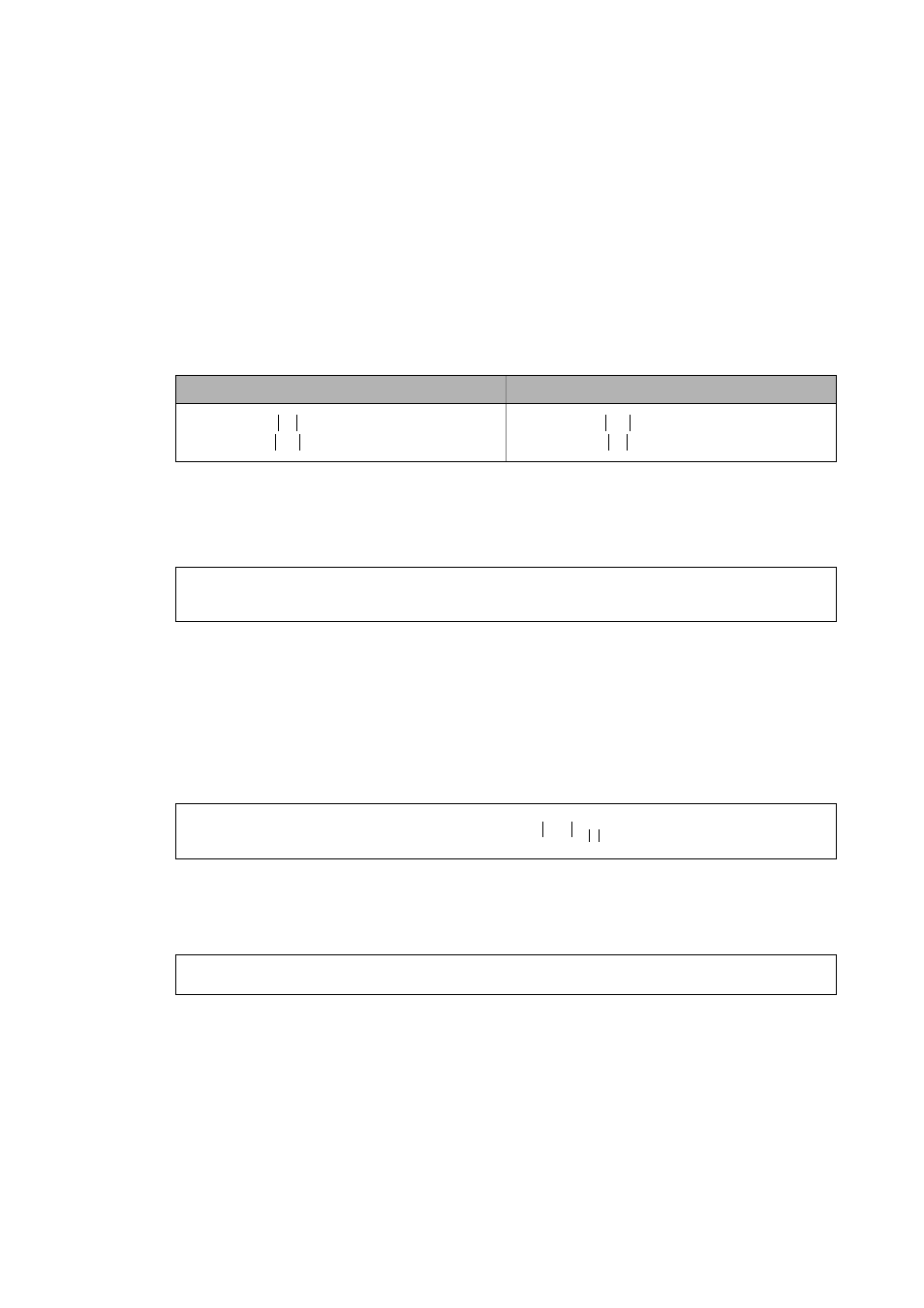
Synchronous drive - single roll
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
7.14.1
Calculations
For a synchronous drive with a single roll according to the drawing the following applies:
Conditions
The force ratio always has to be smaller than the static friction to avoid slippage. The forces F
in
and
F
out
must not be negative. The safety coefficient S provides for a safety reserve that can be individ-
ually adapted to the application. During the application both a motor torque and a regenerative
torque can occur.
For a reliable power transmission from the drive roll to the material the following conditions have
to be met. Otherwise the DSD outputs a message.
[7-148] Equation 1: Balance of forces
Stationary torque
Under the previously mentioned conditions the stationary torque of the roll is calculated as follows:
[7-149] Equation 2: Stationary torque
Friction torque
In order to take the friction into consideration, usually a system efficiency η is specified. Since the
friction torque is a constant torque, a friction torque M
μ
is calculated by means of the efficiency and
the maximum stationary torque which is then considered as a constant torque.
• The direction of the friction torque is always opposed to the direction of movement and is math-
ematically expressed by the fraction v/|v|.
[7-150] Equation 3: Friction torque
Moment of inertia
The total moment of inertia consists of the moments of inertia of the individual components:
[7-151] Equation 4: Total moment of inertia
For the motor torque ( F
in
> F
out
):
For the regenerative torque (F
in
< F
out
):
F
in
F
out
-------------
e
μ
0
α
⋅
1
S
100
---------
–
⋅
<
F
out
F
in
-------------
e
μ
0
α
⋅
1
S
100
---------
–
⋅
<
M
sds
F
in
F
out
–
(
) d
⋅
1000 2
⋅
------------------------------------
=
M
μ
1
η
Brg
----------
1
–
max M
sds
(
) vv-----
⋅
⋅
=
J
sum
J J
L
+
=