3 non-linear motion profiles, Non-linear motion profiles ( 267), 8motion design – Lenze DSD User Manual
Page 267
Lenze · Drive Solution Designer · Manual · DMS 4.2 EN · 12/2013 · TD23
267
8
Motion design
8.2
MotionDesigner
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
8.2.10.3
Non-linear motion profiles
For motion applications (highly dynamic motion drives) in the fields of robotics, mounting, han-
dling, apart from linear profiles there are further motion profiles with a jerk limitation:
•
•
• CAM curve profiles
• CAM curve profiles can be created with the »CAM Designer« in the »Engineer«. Data can be
transferred to the DSD using the exchange format TXT or DPR.
In comparison to a linear motion profile, a motion profile with jerk limitation produces a greater
torque acceleration and thus a higher dynamic torque. Since this only occurs in the medium speed
range and the motor can usually be actuated at higher speeds than those for linear motion profiles,
the additional torque requirement is compensated by the greater gearbox ratio.
Highly dynamic motions result in an increasingly high load of the gearbox. The S-ramp times deter-
mined in DSD must be complied with for the gearbox not to be overloaded.
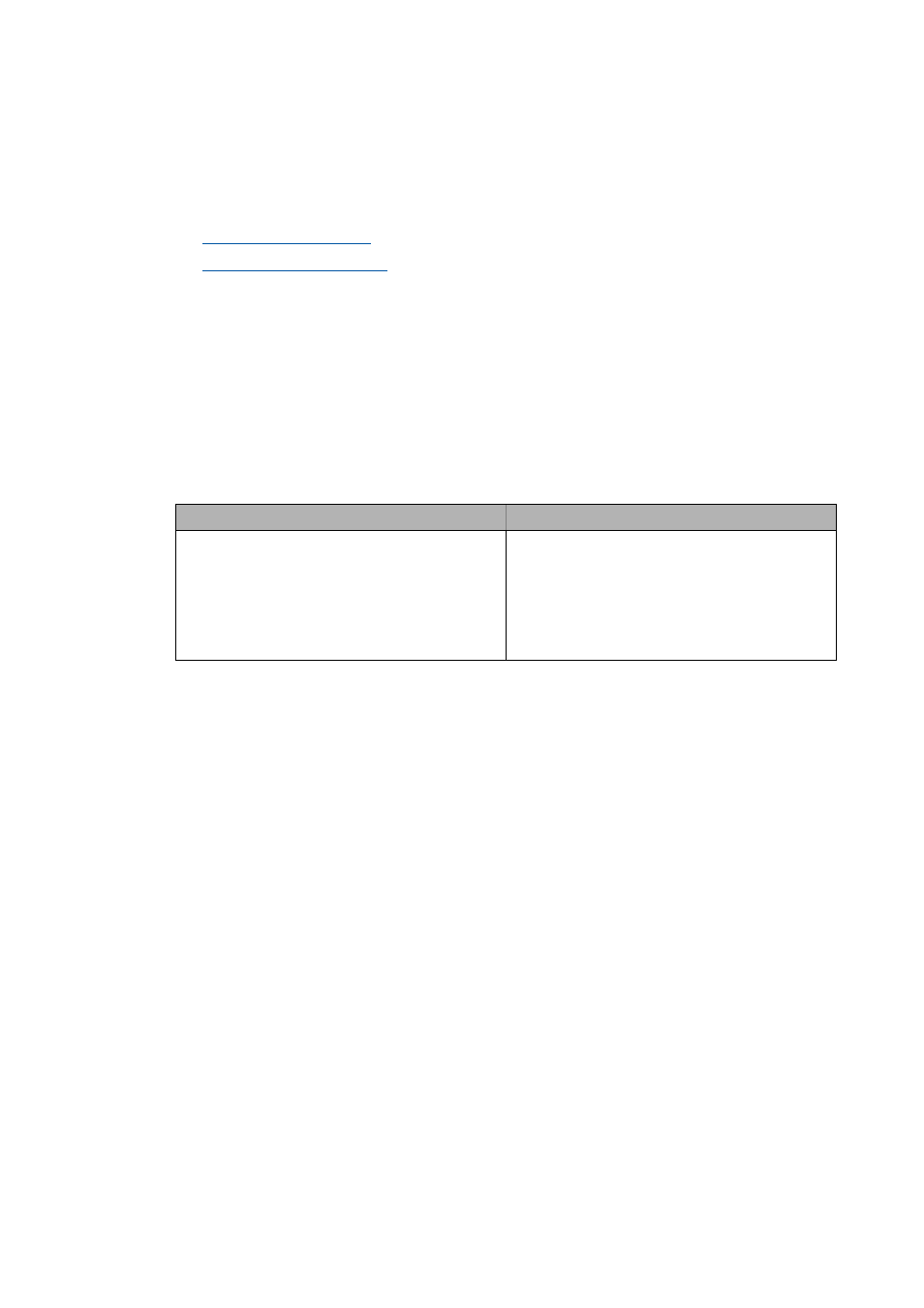
The following table shows advantages of a motion profile with jerk limitation:
Advantages for the application
Advantages for the motor/inverter
• Movement is effected with jerk limitation (s-shaped
motion profile).
• Movement is effected with continuous jerk character-
istics (sin
2
-shaped motion profile, some CAM curve
profiles).
• Mechanical resonances are less active.
• Mechanics are prevented from damage.
• The motor is clearly better utilised in the set of char-
acteristic curves (maximum values of torque and
speed do not arise at the same time, thus higher mo-
tor speeds and greater transmission ratios are possi-
ble).
j
can be reduced.
• More stable control
• Higher dynamic performance