1 required acceleration torque, 2 factors for the stability and quality of control, 11 drive dimensioning – Lenze DSD User Manual
Page 322
11
Drive Dimensioning
11.2
Motor selection
322
Lenze · Drive Solution Designer · Manual · DMS 4.2 EN · 12/2013 · TD23
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
11.2.8.1
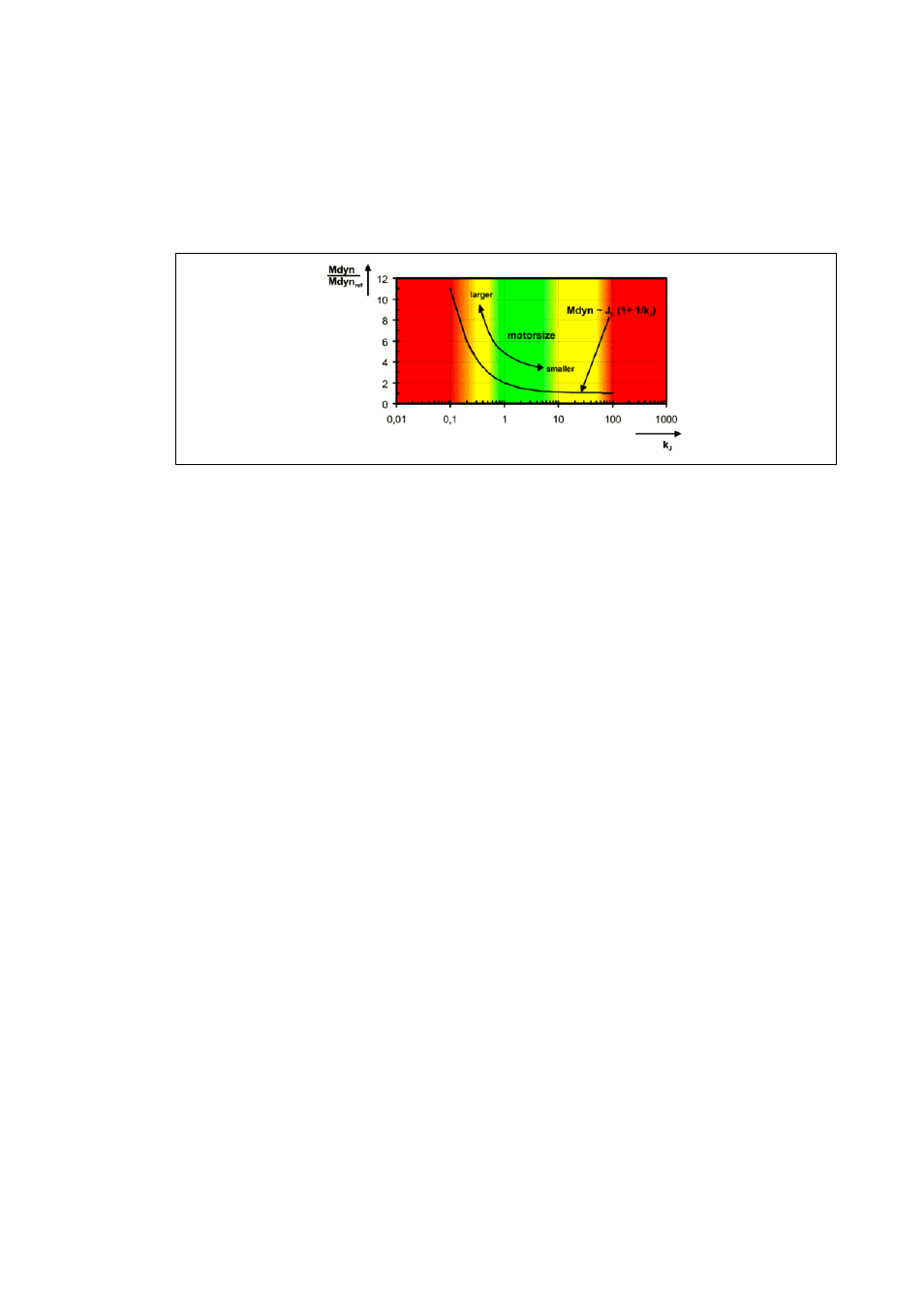
Required acceleration torque
The following diagram shows the required relative acceleration torque as a function of the k
J
factor,
the coloured representation using traffic-light colours giving a rough guide value for optimum sys-
tem properties of motion drives.
[11-6] Required acceleration torque as a function of k
J
• As the K
J
factor becomes higher, the load becomes the increasingly dominant portion of the mo-
ments of inertia, and a larger motor will only slightly reduce the acceleration capability, but will
simultaneously provide improved control-loop quality and system stability.
• A load-matching factor of k
J
= 1 produces the minimum size of a drive.
11.2.8.2
Factors for the stability and quality of control
However, the control stability and quality not only depends on the k
J
factor, but also on other fac-
tors, such as:
• Clearance in the gearbox, in the clutch, etc.
• Elasticity in the gearbox, in the clutch, etc.
• Triggering of the mechanical self-exciting frequency of the application
• Damping of the gearbox
• Load alternation
Tip!
In this case, precise values can only be provided by a test or a simulation of the application
with required known parameters.