6 current derating for inverters, 11 drive dimensioning – Lenze DSD User Manual
Page 352
11
Drive Dimensioning
11.6
Inverters
352
Lenze · Drive Solution Designer · Manual · DMS 4.2 EN · 12/2013 · TD23
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
11.6.1.6
Current derating for inverters
If small field frequencies (3 ... 5 Hz) occur, the max. output current is limited for some inverters. The
torque calculated is no longer reached.
Effects
•
Applications with low field frequencies
• The current derating has a more serious impact on synchronous machines than on asynchro-
nous machines. Due to the missing slip frequency, in the case of asynchronous machines the 5
Hz threshold is not exceeded so quickly.
• During operation in generator mode the current derating is more distinct than during operation
in motor mode.
• If an output current above the standstill current is required for horizontal drives:
• Acceleration movements: The acceleration distance or time will be slightly longer.
• Braking processes: The braking distance slightly increases.
• DC-injection braking: The braking current is reduced, and thus the braking torque provided
by the inverter is reduced.
• Extruder drives which are accelerated to the target speed during a "cold start" have no notice-
able torque reduction within the first minutes during the acceleration phase and following
constant speed phase. The pinch effect with regard to the current, which might possibly oc-
cur should be taken into consideration during the dimensioning. This applies in particular to
great drive powers, since the slip frequency usually decreases with an increasing rated motor
power.
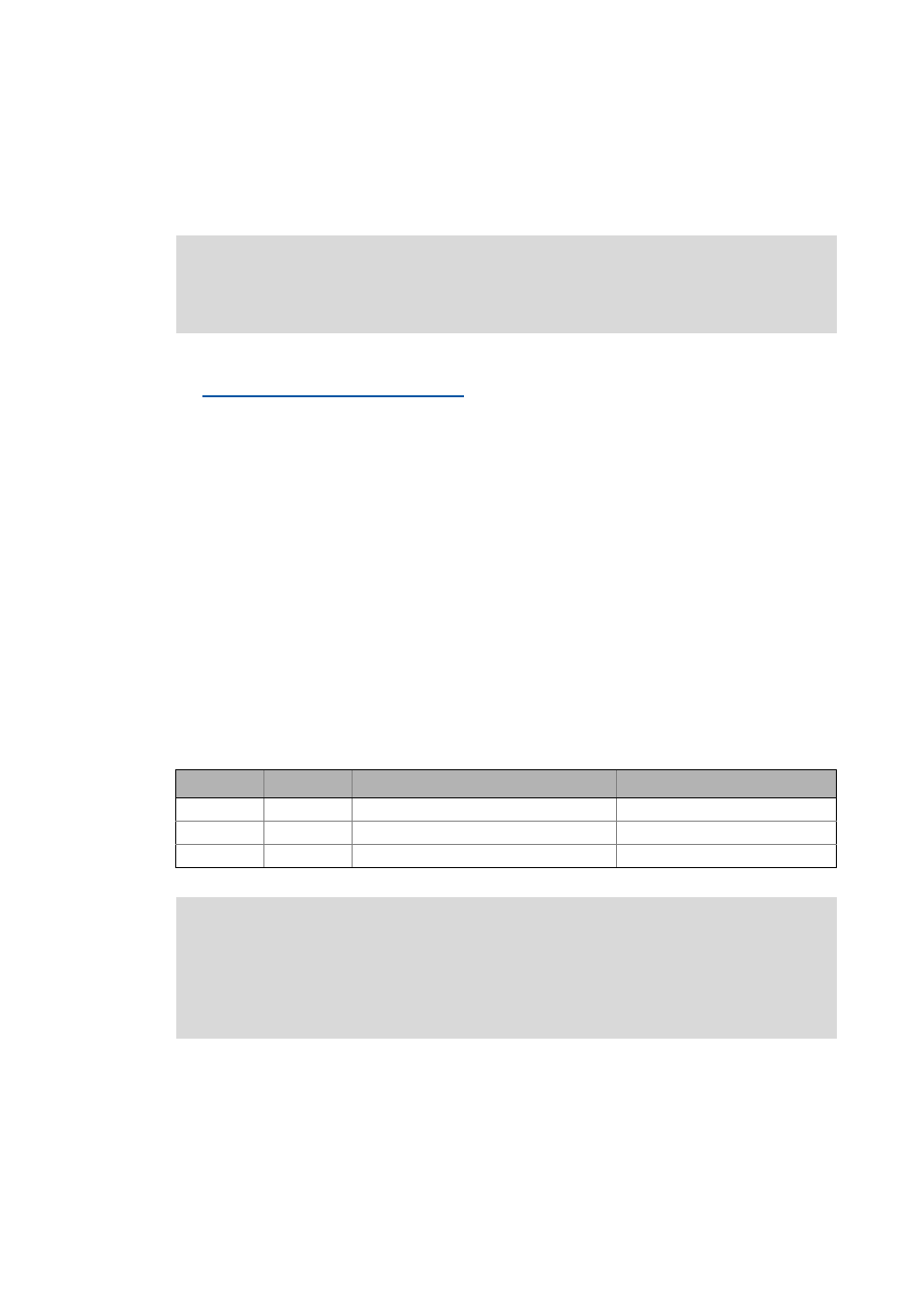
• Slip frequencies of 4-pole asynchronous machines (example):
Note!
The specific restrictions due to the current derating can be found in the respective docu-
mentation for the inverter.
P
n
n
n
Slip speed n
s
(n
0
– n
n
)
Resulting slip frequency f
s
90 kW
1480 rpm
(1500 – 1480) rpm = 20 rpm
0.67 Hz
22 kW
1456 rpm
(1500 – 1456) rpm = 44 rpm
1.47 Hz
4 kW
1435 rpm
(1500 – 1435) rpm = 65 rpm
2.17 Hz
Note!
The DSD takes the output currents specified in the documentation of the inverter
(f
d
> |5 Hz|) as a basis for calculation, and not the standstill currents.
• For passive loads a torque reduction only has a small effect on a greater following er-
ror, and it has no interfering effects on most applications.