Yaskawa MP940 Reference Manual User Manual
Page 511
MotionSuite™ MP940 Machine Controller Reference Manual
Parameters
A-24
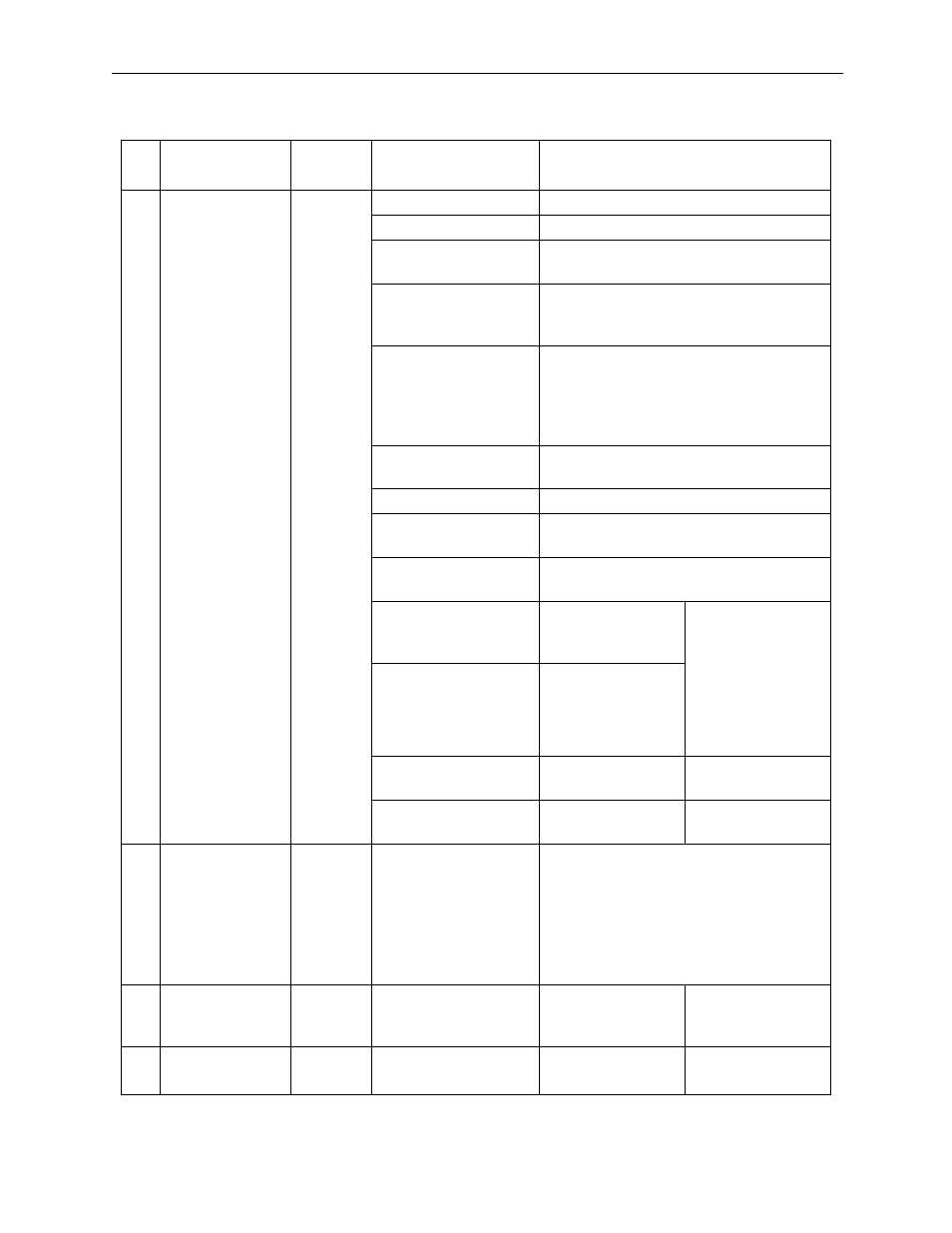
34
Motion
Command
Options
OWC021
Bit 0: HOLD
Command Hold
Bit 1: ABORT
Command Abort
Bit 2: DIRECTION
Direction of Motion
0: Fwd 1: Rev
Bit 3: LAGRST
No one-time delay
(Same as when one-time delay time con-
stant = 0)
Bits 4~7: FILTERTYPE Filter Type
0: No FIlter
1: Exponent Filter (exponent accel/decel)
2: Motion Averaging Filter
(simple S-curve accel/decel)
Bit 8: POS_PPI
Position Loop P/PI Switching
0: P 1: PI
Bit 9: POS_IRST
Position Control Integral Reset
Bit 10: NCOMSEL
Enables speed compensation (OWC018)
during position control
Bit 11: SCMD
SGDH Serial Command Enablement
Flag (0, 1)
Bit 12: LMT_L
Zero-point Return
Reverse Limit Sig-
nal
Fixed Parameter 14
“Additional
Function
Selection” is only
enabled when
setting parameter
OBC021x is set for
use.
Bit 13: LMT_R
Zero-point Return
Forward Limit Sig-
nal
Bit 14: BUF_W
Position
Buffer Write
0: No Processing
1: Writing
Bit 15: BUF_R
Position
Buffer Read
0: No Processing
1: Readout
35
Feed Speed
OLC022
0~2
31-1
(default = 3000)
1 = 10
n
Command units/min
(n = number of places below decimal
point)
In Pulse Units: 1 = 1000 pulses/min
In mm Units: 1 = 1mm/min
In deg Units: 1 = 1deg/min
In inch Units: 1 = 1inch/min
37
External Position-
ing
Move Distance
OLC024
-2
31
~2
31-1
(default = 0)
1 = 1 command unit 1 = 1 pulse when
pulse units
39
Stopping
Distance
OLC026
-2
31
~2
31-1
(default = 0)
1 = 1 command unit For motion
management
Table 8: Setup Parameters (Continued)
No.
Name
Register
Number
Setting Range
(Bit Name)
Meaning