Yaskawa MP940 Reference Manual User Manual
Page 247
MotionSuite™ MP940 Machine Controller Reference Manual
Parameter Details
6-47
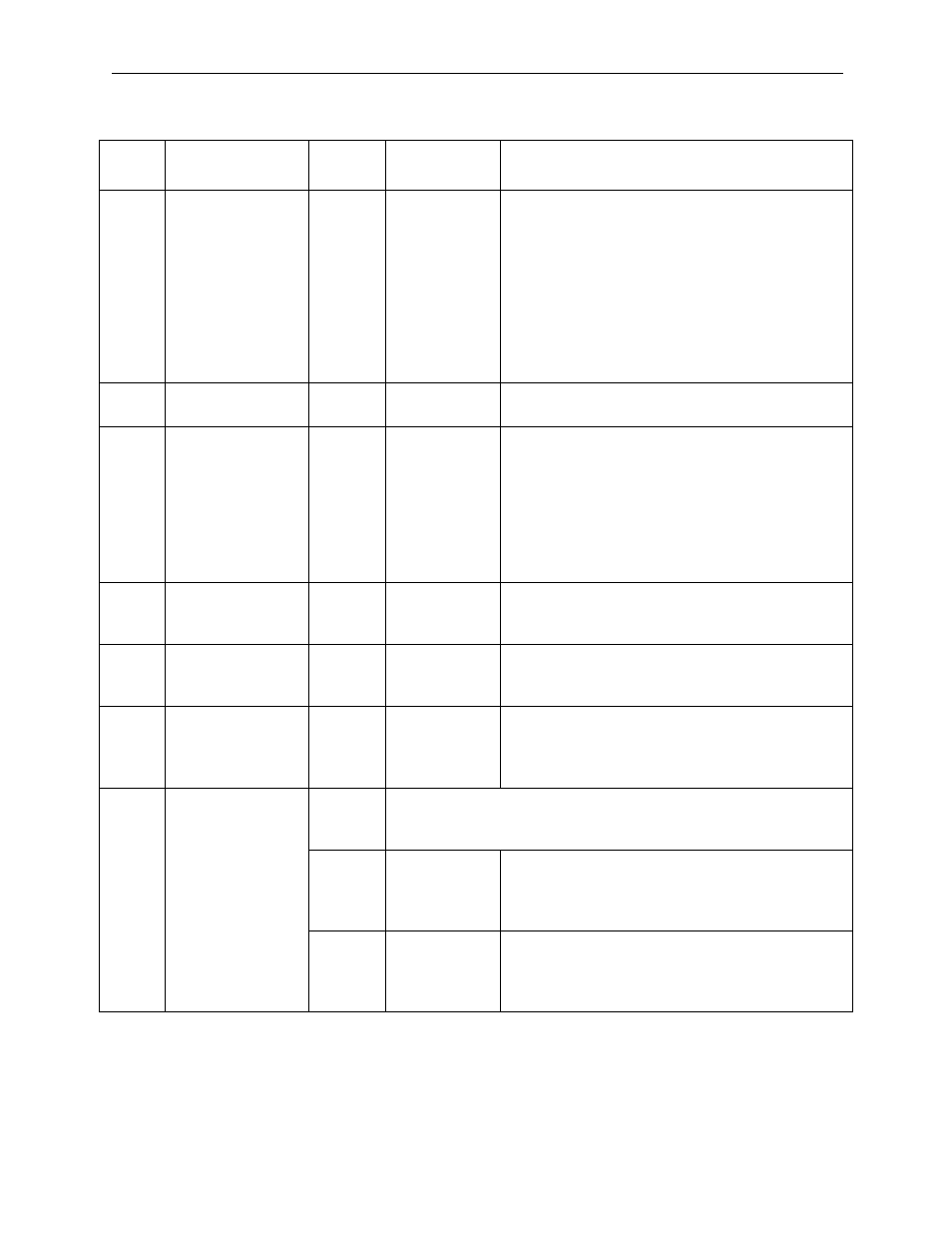
14
Speed Monitor
IWC00D
-32768 ~
32767
Scales and messages the A/D conversion results
for the input analog signal at the value set in Input
Voltage at 100% Speed Monitor (A/D).
Speed Monitor = (A/D Input Voltage X 10000)/
Speed Monitor (A/D)
Input Voltage Setting at 100%
Example: Input Voltage Setting = 6V at 100%
Speed Monitor (A/D)
Messages (3V X 10000)/6V = 5000 when the
actual A/D input voltage = 3V
15
Torque Monitor
IWC00E
-32768 ~
32767
1 = 0.01%
16
Over Range
Parameter Number
IWC00F
1 ~ 65
At Motion
Parameter Set-
ting
101 ~ 148
for Fixed
Motion Param-
eters
Messages the most recent parameter set outside
the setting range in either the motion setting
parameters (OWC000 ~ OWC03F) or the fixed
motion parameters.
Motion Setting Parameters: 1 ~ 65
Fixed Motion Parameters: 101 ~ 148
Messages values where 100 was added to the
parameter number for fixed motion parameters.
17
Number of Abso-
lute Encoder Turns
ILC010
-2
31
~ 2
31-1
Messages the cumulative number of rotations
received from the absolute encoder. Enabled only
when an absolute encoder is used.
19
Initial Incremental
Pulse of Absolute
Encoder
ILC012
-2
31
~ 2
31-1
Messages the number of initial incremental pulses
received from the absolute encoder. Enabled only
when an absolute encoder is used.
21
Servo Command
Type Response
IWC014
0 ~ 65535
Messages the currently executed motion com-
mand (OWC020). See OWC020 for the motion
command. Enabled when a motion command
(OWC020) is used in the position control mode.
22
Servo Module
Command Status
IWC015
Messages the execution state of the motion command (OWC020).
Enabled when a motion command (OWC020) is used in the posi-
tion control mode. The bit structure is shown below:
Bit 0
Command
Execution Flag
(BUSY)
Messages the motion command status.
0: Ready
(Done)1: BUSY (Processing)
This bit is used as a status during interruption.
Bit 1
Command
Hold comple-
tion flag
(HOLDL)
ON at hold completion. Refer to the motion func-
tion “Hold “ itself for details.
Other Monitor Parameters (Continued)
Number
Name
Register
Number
Bit Name
Content