Other command/mode settings (continued) – Yaskawa MP940 Reference Manual User Manual
Page 236
Parameter Details
MotionSuite™ MP940 Machine Controller Reference Manual
6-36
34
Motion
Command
Options
Bit 14
Position Buffer
Write-in
(BUF_W)
The data set in position buffer write-in
data (OLC03A) is stored in the position
buffer set in the position buffer access
number (OLC038) as absolute position
data.
0
Bit 15
Position Buffer
Read-out
(BUF_R)
This reads out data from a position buffer
designated in the position buffer access
number (OLC038), and stores it in posi-
tion buffer read-out data (ILC028). This is
used when verifying position data stored
in the position buffer.
Be aware that 2 scans are required from
the time that read-out is commanded until
the data is stored in position buffer read-
out data (ILC028).
0
35
Feed Speed
OLC022
0 ~ 2
31-1
Set the fast feed speed in 10n command
units/min. (n: dumber of decimal places)
when the speed reference selection
(OBC001D) is set to 0.
When displayed by setting unit:
Pulse Unit Time: 1 = 1000 pulse/min.
When unit is mm: 1 = 1mm/min.
deg Units: 1 = 1deg/min.
Inch Units: F 18>
1 = 1inch/min.
Used when a motion command
(OWC020) is used in the position control
mode.
0
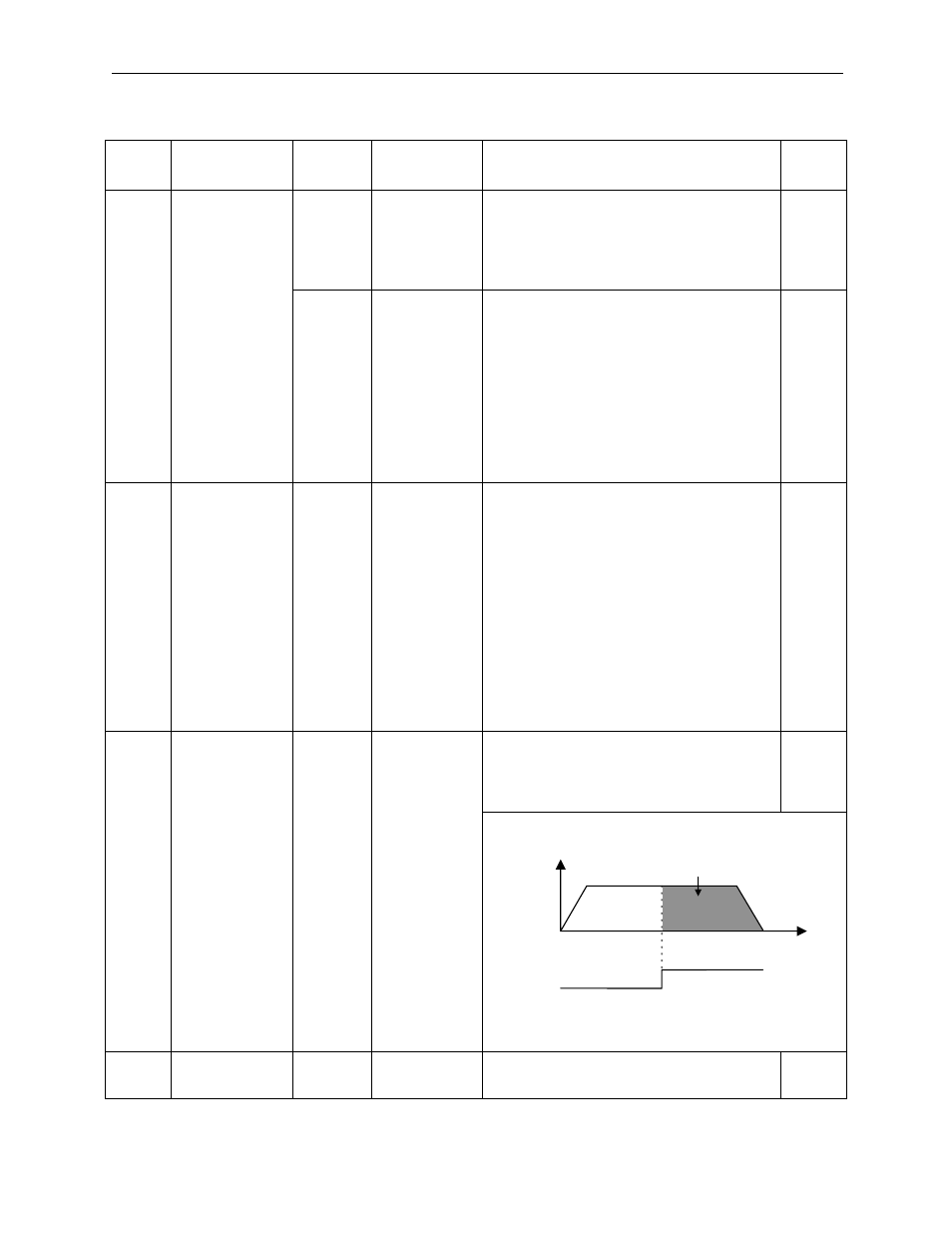
37
External
Positioning Move
Distance
OLC024
-2
31
~ 2
31-1
Sets the distance from where the latch
signal is input (external positioning signal)
to stoppage during external positioning
(EX_POSING).
0
Used when a motion command (OWC020) is used
in position control mode.
39
Stopping
Distance
OLC026
-2
31
~ 2
31-1
Used as a system. Do not use this param-
eter.
0
Other Command/Mode Settings (Continued)
Number
Name
Register
Number
Setting Range
Content
Default
Value
External Positioning
Run Distance
v
t
Latch
Signal