Run mode setting (runmod) (continued) – Yaskawa MP940 Reference Manual User Manual
Page 220
Parameter Details
MotionSuite™ MP940 Machine Controller Reference Manual
6-20
Bit 7
(contin-
ued)
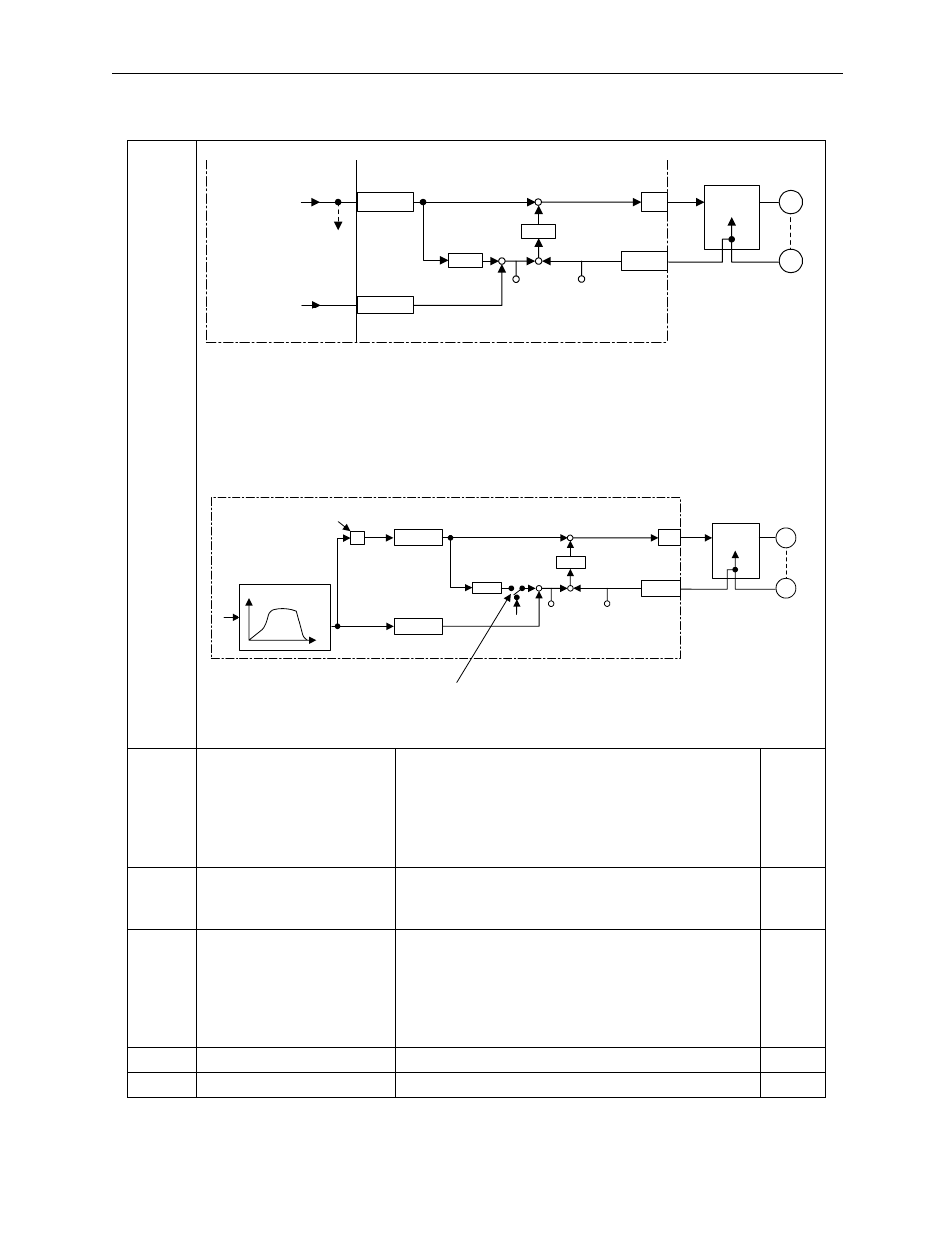
Phase Control Loop (Electronic Shaft)
∗1.Integrates the base speed reference, and calculates the matching position (pulse).
∗2.Generates the speed reference from the deviation e between the target position (CPOS) and the current
position (APOS).This becomes the position (phase) compensation.
∗3.If phases are to be displaced, add the amount of displacement (convert the angle of rotation of the motor axis
into number of pulses) as the phase compensation setting.
Electronic Cam Control Loop
The electronic cam control loop cuts the integral circuit of the base speed reference, and sends the position
reference according to the phase compensation setting.
Bit 8
Motion Command Mode
Enabled/Disabled
(MCDSEL)
Selects whether a motion command code
(OWC020) is used or not.
0: Disabled; 1: Enabled
Enabled only when the motion command usage
selection (fixed parameter, No. 14, bit 7) is Used (=
1).
1
Bit 9
Zero-point Return Direc-
tion Selection (ZRNDIR)
Designates the zero-point return direction.
0:Reverse Direction (Position pulse decreases)
1: Forward Direction (Position pulse increases)
0
Bit 10
Absolute Position Readout
Request (ABSRD)
When this bit is turned ON, absolute position data is
read out from the absolute encoder.The absolute
position readout completion signal (Bit 10
ofIWC000) is ON upon completion of readout.
This is used when servo drive power is turned ON
while the MP940 is in a power ON state.
0
Bit 11
Unused
Set 0
0
Bit 12
Unused
Set 0
0
RUN Mode Setting (RUNMOD) (Continued)
Speed
Control
OWCO15
D/A
Integral
PI
Counter
OLCO16
NREF
PHBIAS
M
PG
Servo Driver
+
±
ε
+
-
+
+
CPOS
ILxx02
APOS
ILxx08
to other
machine
Base Speed
Reference Setting
Phase
Compensation
Setting
SVA Module
CPU Module
∗2
∗1
∗3
OWCO15
D/A
Integral
PI
Counter
OLCO16
NREF
PHBIAS
M
PG
Servo Driver
+
±
ε
+
-
CPOS
ILxx02
APOS
ILxx08
SVA Module
X
θ
Position Reference
Generation
S
Position
Reference
Total Variation Per Scan
CPU Module
θ
The integral circuit will be cut if the position reference generation operation is disabled (bit 7 of OWC000 is ON).
Speed
Control