User program example (external positioning) – Yaskawa MP940 Reference Manual User Manual
Page 459
External Positioning (EX_POSING)
MotionSuite™ MP940 Machine Controller Reference Manual
11-62
User Program Example (external positioning)
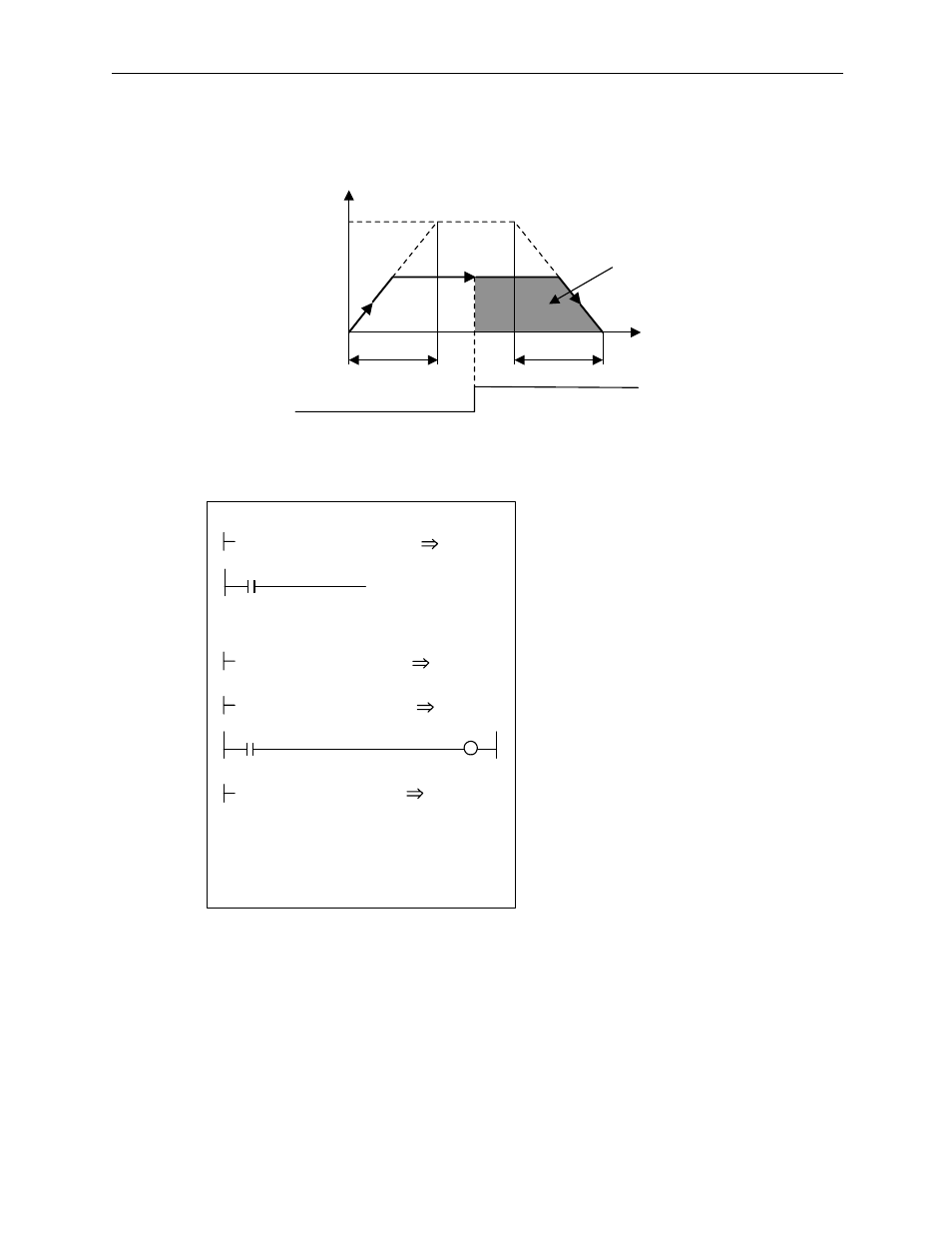
Example of Running Desired Operation (External Positioning Pattern Example)
Ladder Program Example (External Positioning Program Example - Dwg H03)
Although the examples in the above figures are extremely simplified, in
reality each of the register types can be freely controlled by the user program.
Speed
(%)
(100%)
0
time
(t)
Fast Feed
Speed
Linear Acceleration
Time Constant
Linear Deceleration
Time Constant
Rated Speed
Latch Signal (external positioning signal)
External
Positioning
Run Distance
IFON
H0104
RUNMOD
OWC000
0000010000
EXMDIST
OLC024
RUN
OBC0010
SB000004
2
MCMDCODE
OWC020
IEND
DEND
Execute external positioning
(EX_POSING) as a motion command
Starts position control and moves to
the absolute position1000000 when
IB00304 is ON.
the axis will move by only the external
positioning run distance (10000
pulses) at latch signal input (external
positioning signal) during feed motion
execution. The positioning completion
signal IBC000D goes ON at the
completion of motion. If the latch
signal is not input, then the posiitioning
completion signal IBC000D goes ON
when absolute position 10000 is
reached.
RUNPB
IB00304
External Positioning Run Distance
(EXMDIST)
RUN Command to driver (RUN)
Position control mode ON
0001000000
XREF
OLC012
Position Control pulse (XREF)
(Absolute Position: 1000000)