Yaskawa MP940 Reference Manual User Manual
Page 495
MotionSuite™ MP940 Machine Controller Reference Manual
Switch List
A-8
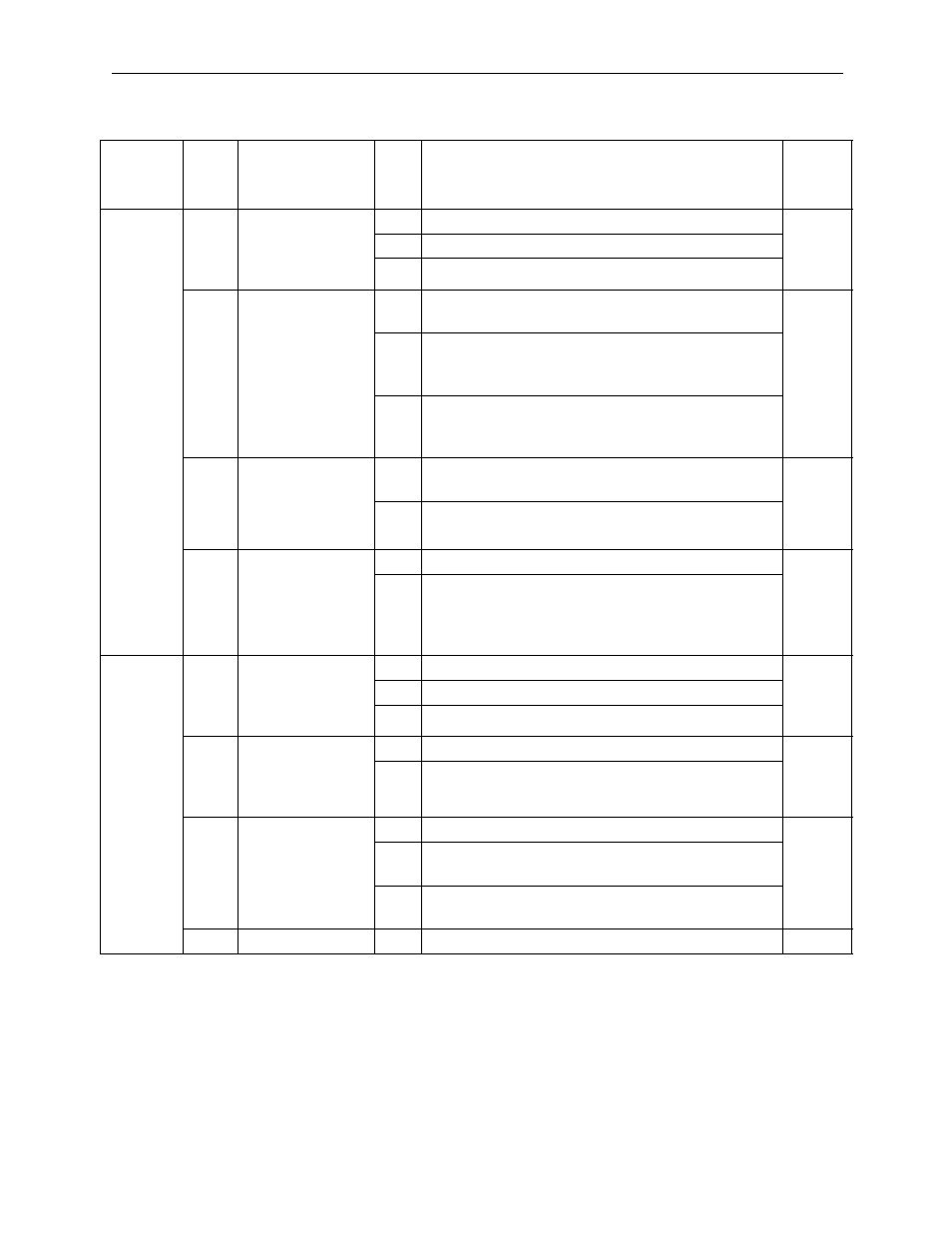
Pn001
Function
Selection
Applica-
tion
0
Stop Method at
Servo OFF
and Alarm Occur-
rence
0
Stop the motor by dynamic braking (DB).
0
1
Stop the motor by DB, then release DB.
2
Do not use DB, coast to stop instead.
1
Stop Method at
Overtravel (OT)
0
Stop the motor by dynamic braking.
(same stopping method as in Pn001.0)
0
1
The motor assumes the torque set in Pn406 to be
the maximum, decelerates to a stop, and then goes
to a servo lock state.
2
The motor assumes the torque set in Pn406 to be
the maximum, decelerates to a stop, and then goes
to a free run state.
2
AC/DC Power
Input
Selection
0
Not Compatible with DC Input: Inputs AC power
from the L1, L2, (L3) terminals
0
1
DC Input-compatible: Inputs DC power from the
(+)1
–
(-) power input.
3
Warning Code
Output Selection
0
ALO1, ALO2, and ALO3 output alarm codes only. 0
1
AL01, AL02, and AL03 output both alarm codes
and warning codes. However, the ALM signal out-
put remains in an ON (normal) state when a warn-
ing code is output.
Pn002
Function
Selection
Applica-
tion
0
Speed Control
Option
(T-REF assign-
ment)
0
None
0
1
Uses T-REF as an external torque limit input.
2
Uses T-REF as the torque feed-forward input.
1
Torque Control
Option
(V-REF
assignment)
0
None
0
1
Uses V-REF as an external speed limit input.
2
Absolute Encoder
Usage Method
0
Uses an absolute encoder as an absolute encoder. 0
1
Uses an absolute encoder as an incremental
encoder.
2
Uses an absolute encoder as an absolute encoder.
Uses a multi-turn limit.
3
Reserved
0
—
0
Table 2: Switches (Continued)
User
Parameter
Number
De
c
im
a
l
Pl
ac
e
Name
S
e
tti
ng
Content
Factory
Setting