Yaskawa MP940 Reference Manual User Manual
Page 456
MotionSuite™ MP940 Machine Controller Reference Manual
External Positioning (EX_POSING)
11-59
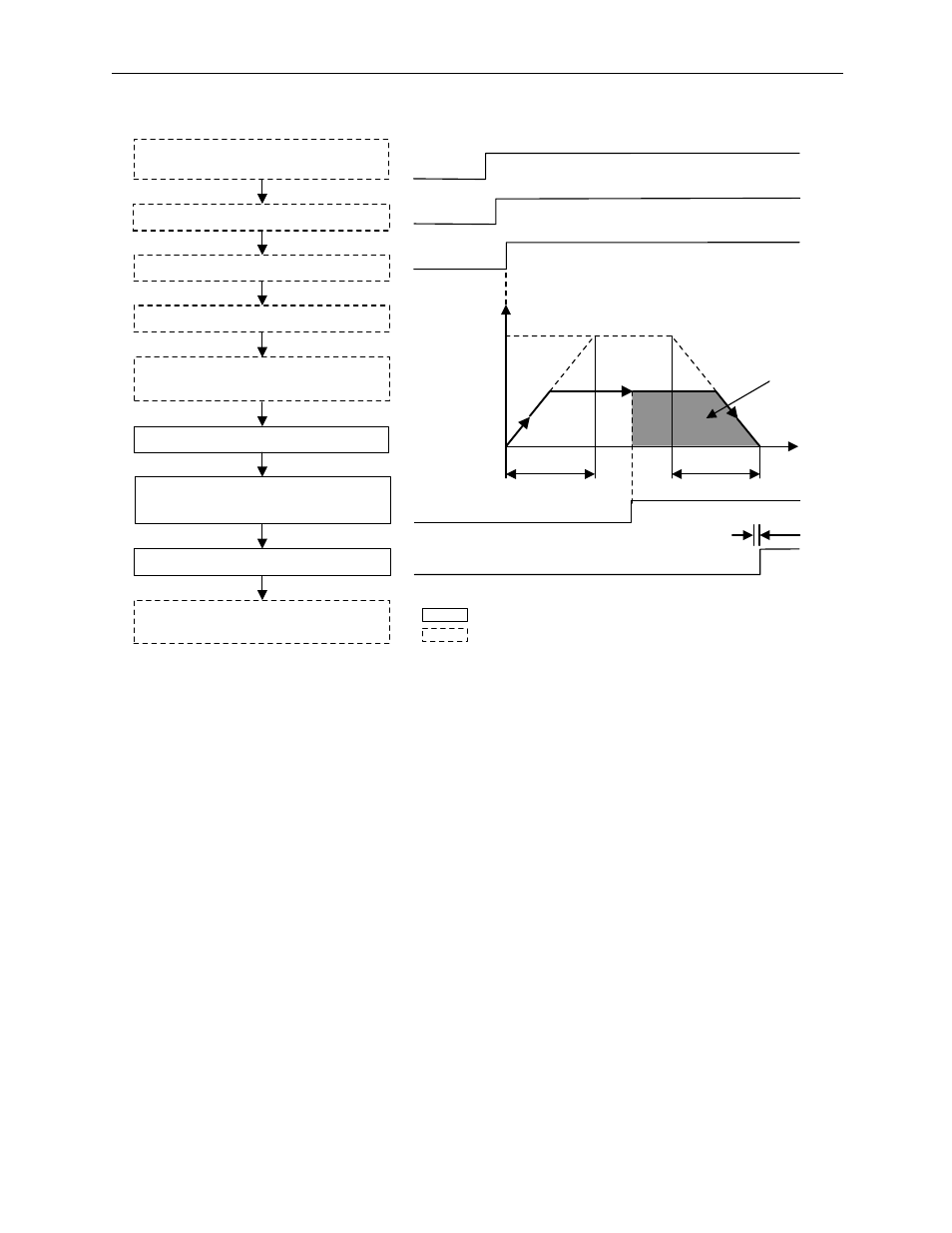
1. Set initial fixed motion parameter and motion setting parameter values
to match the customer's machine.
2. Select the position control mode (PCON) (Bit 2 of OWC000).
3. Set the motion setting parameters used in external positioning
(EX_POSING).
4. Turn the RUN command (Bit 0 of OWC001) ON.
Set external positioning (EX_POSING = 2) in the motion commands
(OWC020).
a.
External Positioning Command Run Start
Speed
(%)
(100%)
0
Time
(t)
Fast Feed
Speed
Linear Acceleration
Time Constant
Linear Deceleration
Time Constant
Rated Speed
1. Fixed Motion Parameter Setting
Setting of initial motion setting parameters
2. Set Position Control Mode (PCON)
3. Set motion setting parameters
4. Turn Servo ON (RUN) ON
6. Start of positioning operation
Signifies system execution.
5. Motion Commands
Execute external positioning
(EX_POSING)
7. Moves for the external only positioning
run distance at latch signal input
POSCONP
Positioning Completion Range
Signifies user setting.
Latch Signal (External Positioning Signal)
External
Positioning
Run Distance
8. Positioning completion signal
(POSCOMP) is ON
9. Motion Command Release
(Executes (NOP (=0))
RUN
PCON
Motion
Command
(EX-POSING)