Sg dh – Yaskawa MP940 Reference Manual User Manual
Page 425
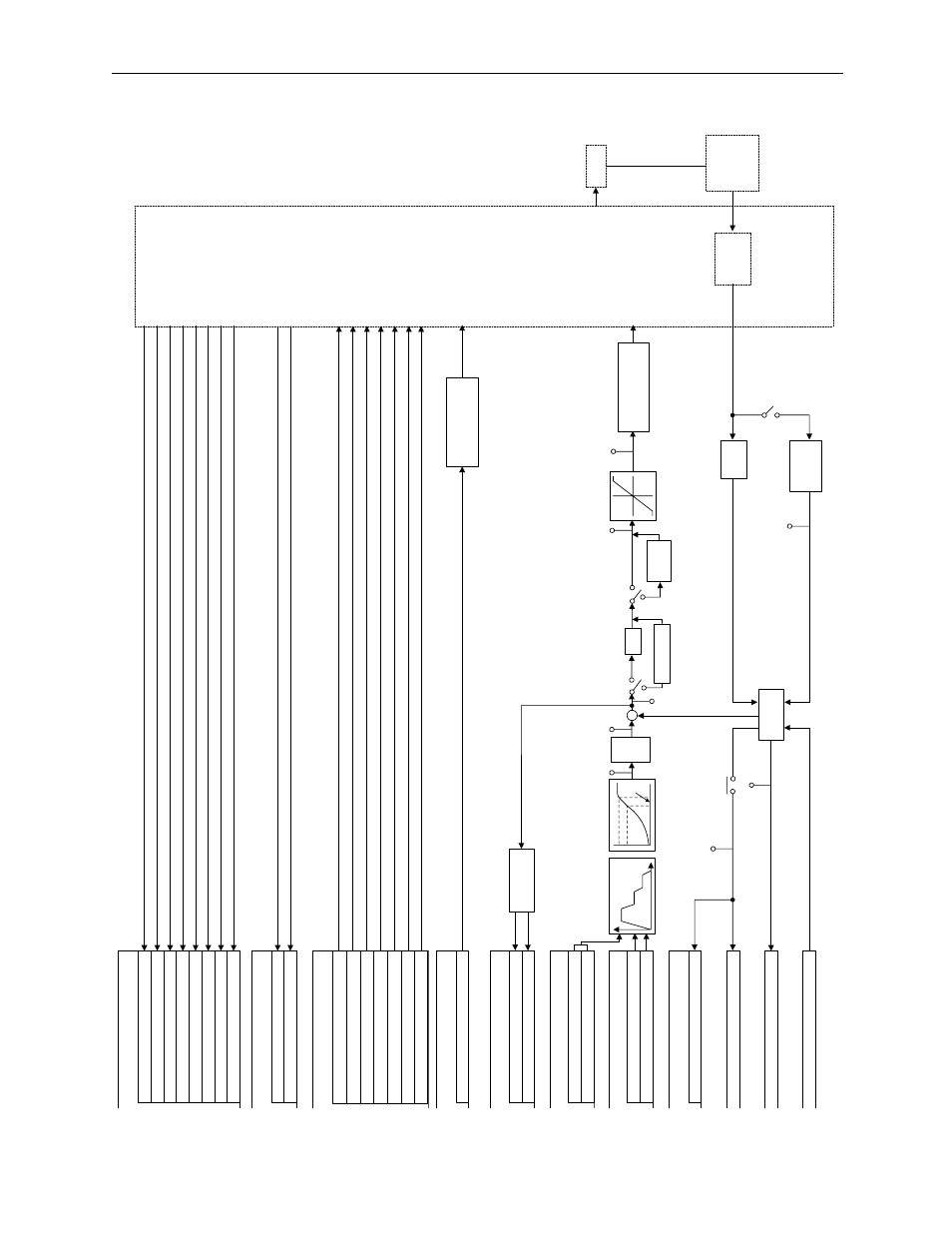
Control Mode
MotionSuite™ MP940 Machine Controller Reference Manual
11-28
T
o
rqu
e L
im
it
S
et
ti
ng
P
o
si
ti
ve
To
rq
ue
Li
m
ti
S
e
tt
ing
(
O
W
C
002
)
M
ac
h
ine C
oor
di
nate
F
e
edb
ac
k
(
IL
C
006
)
Z
ero
P
o
s
itio
n O
ffse
t (
O
LC
0
0
6
)
M
ac
hi
ne
C
o
or
di
na
te
L
a
tch
P
o
s
it
io
n
(
IL
C
0
0
8
)
R
un
St
a
tus
(
IW
C
0
0
0
)
DI
Latc
h
Com
pl
eti
on
Si
gnal
(
IBC00
0B)
Cu
rr
e
n
t
Po
s
itio
n
C
a
lc
ul
a
tio
n
Ab
s
o
lu
te
P
o
s
it
io
n
Re
c
epti
on
M
u
lt
ip
le
SG
DH
Mo
to
r
A
b
so
lu
te
/
Inc
rem
e
nt
al
E
n
c
o
der
Di
vi
de
r
ILC
0
06
(L
PO
S)
IL
C0
08
(A
PO
S
)
Ex
tern
al
La
tch
Si
gn
al
IL
C
0
1
0
(A
BSRE
V)
IL
C
0
1
2
(IP
U
LS
E)
Ab
so
lu
te
En
co
de
r
IW
C
0
0
C
(S
P
DREF
)
Sp
e
e
d
Li
m
it
e
r
O
W
C
004
(N
L
IM
P
)
0
OW
C
0
0
5
(N
L
IM
N
)
v
t
t
p
Ts
δp
De
v
iat
io
n
Det
er
m
ina
ti
on
Kp
R
un
St
a
tus
(
IW
C
0
0
0
)
D
e
v
iati
on
E
rror (
IB
C
00
00
)
P
o
si
ti
oni
ng
C
om
p
le
ti
o
n S
ign
al
(
IB
C
00
0F
)
1-
ti
m
e
Del
a
y
OB
C0
2
1
B
OW
C0
1
0
+
-
OF
F
ON
=0
≠
0
O
W
C
037
PI
C
o
n
tro
l
L
in
ea
r Ac
ce
l/D
e
cel
Ti
m
e
C
o
n
s
ta
nt
L
in
ear
Dec
e
l
T
ime
Con
s
tant
(O
WC0
0D
)
L
in
ear
Ac
c
e
l T
im
e
Co
ns
tan
t (
O
WC
00C
)
Z
e
ro
Po
in
t R
e
tu
rn
Mo
d
e
Pa
ra
me
te
rs
Cr
ee
p
S
pe
ed
S
et
ti
ng
(
O
W
C00
B
)
A
p
pr
o
a
c
h
S
pe
ed
S
e
tt
ing
(
O
W
C
00
A
)
IL
C
0
0
A
(PERR)
ILC
002
(C
PO
S)
IL
C
0
0
4
(PT
G
DIF)
Ze
ro
P
o
in
t
R
e
tu
rn
Sp
e
e
d
Ge
n
e
ra
ti
o
n
Po
s
iit
o
n
Pa
tt
e
rn
Ge
n
e
ra
ti
o
n
S
e
rv
o
Dr
iv
e S
tat
u
s (I
W
C
00
1
)
A
na
lo
g M
o
n
ito
r
Sp
ee
d M
on
it
o
r (I
W
C
00
D
)
R
UN Co
mm
an
d (
O
WC0
01
)
S
IO
: G
e
ne
ra
l Inp
ut - - -
- - - - D
I0
P
E
C
: O
rig
in
LS - - - - - -
- - - -D
I1
P
-O
T
: F
w
d O
T
- - - - - - - - -
-
DI2
N
-O
T
: R
e
v. O
T
- - - - - - - - - -D
I3
E
X
T
1
: E
x
te
rn
al
I
n
put
S
igna
l 1
-
DI
4
E
X
T
2:
E
x
te
rn
al
I
n
put
S
igna
l 2
-
DI
5
R
u
n
(R
U
N
) - -
-
- - - - - - - - D
O
0
Z
e
ro
Cl
am
p In
pu
t - - - - - - -D
O
5
Sp
ee
d L
o
o
p
P
/PI
Co
nt
ro
l -
-
D
O
1
G
a
in
Sw
it
ch
in
g - - - - - - - - -
D
O
2
F
w
d Ex
te
rn
a
l
T
o
rque
Li
mi
t
Inpu
t
- DO
3
R
e
v
Ex
ter
n
al
T
o
rq
ue L
im
it Inp
ut -
D
O
4
Sp
ee
d M
on
ito
r
E
X
T
3
: E
x
te
rn
al
I
n
put
S
igna
l 3
-
DI
6
A
L
M
: S
e
rv
o A
la
rm
- - - - - -
-
D
I7
T
o
rq
ue
M
o
ni
tor (IW
C
00
E
)
To
rq
ue
M
o
n
ito
r
Se
ns
or
O
N
(
S
E
N
)
To
rqu
e R
e
fere
nc
e
Co
n
ver
sio
n
To
rq
ue
Re
fe
re
n
c
e
(T
or
qu
e L
im
it
)
S
p
ee
d R
e
fere
nc
e
Co
nv
er
s
io
n
Sp
e
e
d
R
e
fer
enc
e
OW
C
0
3
5
OW
C
0
3
6
Target
Position
Calculation