Yaskawa MP940 Reference Manual User Manual
Page 454
MotionSuite™ MP940 Machine Controller Reference Manual
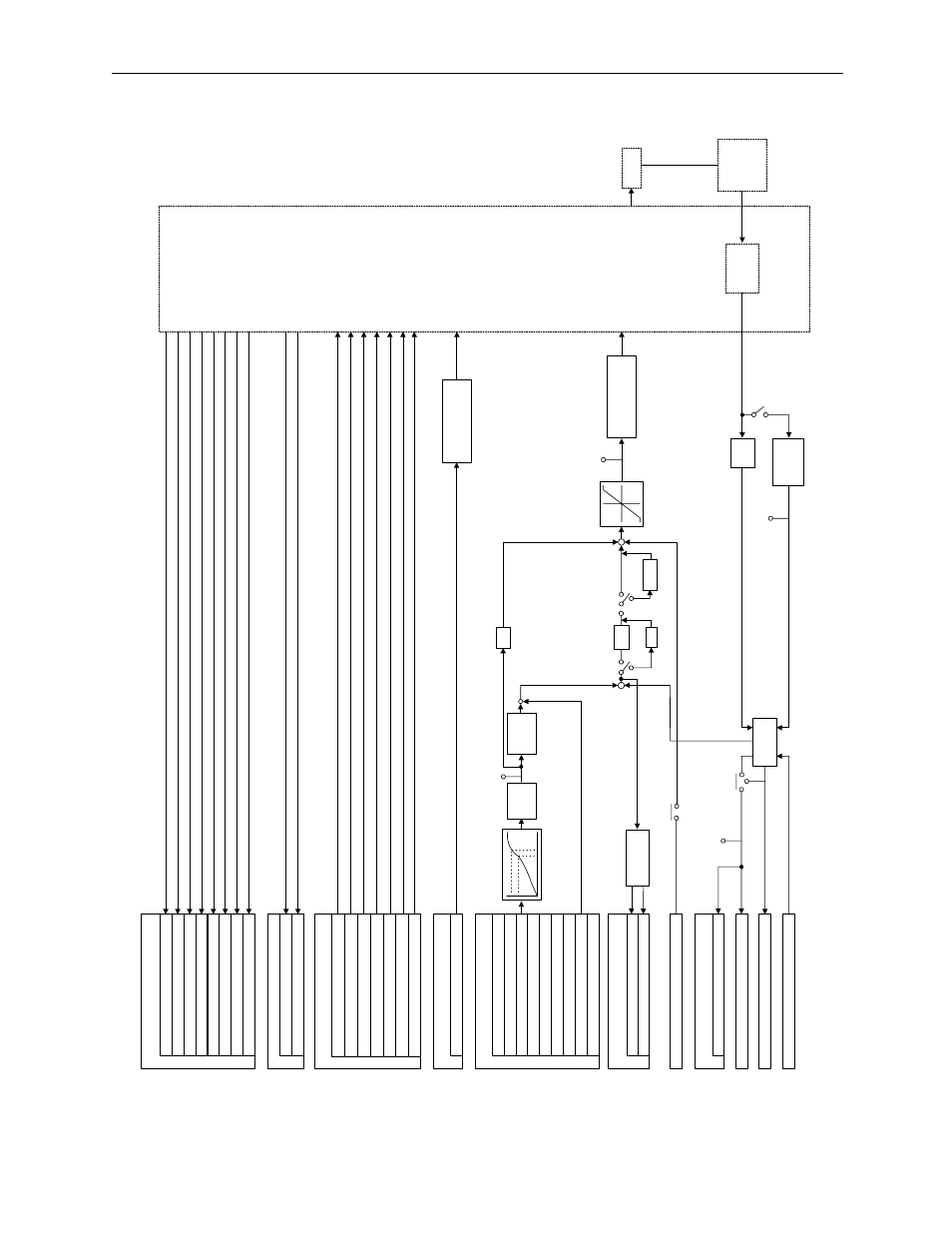
Position Control by Motion Commands
11-57
T
o
rq
u
e
L
im
it Settin
g
Ma
c
hi
n
e C
oor
di
na
te
F
eed
bac
k
(
IL
C
006
)
Z
e
ro
P
o
si
it
o
n
O
ffset (
O
LC
00
6)
Machine Coordinate Lat
ch Pos
ition (ILC008
)
R
UN S
ta
tus
(
IWC0
00
)
D
I La
tc
h C
o
mp
le
ti
o
n
S
igna
l (
IB
C
0
00B
)
P
a
rame
te
rs
U
s
ed
i
n
P
o
s
it
io
n
C
ont
ro
l Mode
Ab
s
o
lu
te
Po
s
it
io
n
Re
ce
p
ti
o
n
Mu
lt
.
OW
C
004
(N
L
IM
P
)
0
OW
C
005
(N
LI
M
N
)
T
o
rqu
e R
efe
re
nce
Co
nve
rsti
on
SGD
H
Ab
s
olu
te/
Inc
rem
en
tal
En
c
o
de
r
Di
v
id
e
r
IWC0
0C
(SPD
R
E
F)
IL
C0
06
(L
PO
S)
IL
C00
8
(APO
S)
E
xte
rna
l L
a
tch
S
ign
al
IL
C
010
(A
B
S
R
E
V
)
IL
C0
1
2
(I
PUL
SE)
Ab
so
lu
te
En
c
o
d
e
r
Sp
e
e
d
Li
mi
t
Fw
d.
Tor
que
L
imi
t S
e
tt
in
g
(
O
W
C
002
)
P
o
s
ition Reference
Pulse S
e
tting (OLC012)
P
o
si
ti
o
n
L
o
o
p
G
a
in
S
e
tt
in
g
(
O
W
C0
1
0
)
Fee
d
For
w
ar
d Ga
in
S
e
tt
in
g
(
O
W
C
01
1)
P
o
s
it
ioni
n
g
C
o
m
p
le
ti
o
n
R
a
n
ge S
e
tt
in
g
(O
WC
00E
)
P
o
si
ti
on D
e
vi
at
ion E
rr
o
r
D
e
te
ct
ion
(O
WC
0
0
F)
C
ompe
ns
at
io
n P
ul
s
e S
et
ti
n
g (O
LC
01
E
)
p
t
δp
ts
S
pee
d R
ef
er
enc
e S
et
ti
ng (O
W
C
01
5
)
Ta
rg
e
t
Po
s
it
io
n
C
al
c
ul
at
ion
ILC
00
4
(P
T
G
D
IF)
De
vi
a
ti
o
n
D
e
termi
n
at
io
n
S
p
ee
d R
ef
e
re
nc
e
Co
nve
rsi
o
n
R
UN S
ta
tus
(
IWC0
00
)
D
e
vi
a
ti
on
E
rro
r (
B
xx
00
0)
P
o
s
itioning Complet
ion Signal (
IBx
x00D)
S
p
eed
C
o
mpen
s
a
ti
on
S
e
tt
ing
(
O
W
C
0
18
)
Mo
to
r
F
ilte
r
NNU
M
Current
P
o
sition
Ca
lculation
P
os
it
ion P
at
te
rn Gen
erat
ion
OWC011
OWC010
OBC021A
Se
rv
o
Am
p
lif
ie
r St
a
tu
s
(
IWC0
0
1
)
A
n
a
log Mo
ni
to
r
S
p
ee
d M
o
n
itor
(IWC0
0D
)
RU
N
Co
m
m
an
d (
O
W
C
0
0
1
)
S
IO: Ge
ne
ra
l Inp
ut -
- -D
I0
P
E
C
: Orig
in
LS
-
- -D
I1
P
-O
T
: F
o
rw
ar
d OT
- -
-DI2
N
-OT
: R
e
ve
rse
OT
- - -D
I3
EX
T
1
: Ex
ternal
I
nput
Sig
nal 1
D
I4
EX
T
2
: Ex
ternal
I
nput
Sig
nal 2
D
I5
Run
(
R
UN)
-
-
-
D
O0
Z
e
ro
Cla
m
p
Inp
ut -
-
-
D
O5
Sp
e
e
d
L
o
o
p
P/
PI
Co
n
tr
o
l -
D
O
1
Gain
S
w
itchi
ng
-
DO2
F
w
d
E
x
te
rn
a
l T
o
rq
u
e
L
im
it
In
p
u
t
-D
O
3
R
e
v
E
x
te
rna
l
T
orq
ue Li
mi
t I
n
put
-D
O4
S
p
ee
d M
on
it
or
EX
T
3:
Ex
ternal
I
npu
t Sig
nal 3
D
I6
AL
M
:
S
e
rv
o
A
la
rm
- -
D
I7
To
rq
ue
Mo
ni
to
r (
IW
C
0
0
E
)
T
o
rq
ue
M
o
ni
tor
Se
n
s
o
r O
N
(
SEN)
Kp
PI
OWC0035
OWC0036
1-Time
Delay
OWC0037
Kf
Torque Reference
(Torque Limit
)
Speed
Reference
Li
ne
ar
A
c
c
e
le
ra
ti
o
n
Ti
me (
O
W
C
00
C
)
Li
ne
ar
D
e
c
e
le
ra
ti
on
Ti
me
(
O
W
C
0
0D
)